Đảm bảo hoạt động của hệ thống phòng không chống lại các mục tiêu bay thấp mà không có sự tham gia của lực lượng hàng không Không quân
Độ cong của bề mặt trái đất và sự không bằng phẳng của địa hình đã hạn chế nghiêm trọng khả năng của các hệ thống phòng không trên mặt đất và trên tàu trong việc phát hiện và đánh bại các loại vũ khí tấn công đường không bay thấp (LWS). Làm thế nào bạn có thể đảm bảo hiệu quả khả năng của hệ thống phòng không bắn vào các mục tiêu bay thấp?
Một lựa chọn là đặt radar trên thiết bị nâng cột buồm (PMU). Nếu chúng ta đặt radar ở độ cao 15 mét, thì phạm vi quan sát của máy bay (LA) di chuyển ở độ cao 50 mét so với bề mặt sẽ là 41 km. Tăng chiều cao PMU lên 50 mét sẽ làm tăng phạm vi quan sát lý thuyết chỉ 13 km (lên đến 54 km), trong khi độ phức tạp và cồng kềnh của thiết bị này sẽ tăng lên ở mức độ lớn hơn nhiều.
Có vẻ như đó là điều khá bình thường đối với các hệ thống phòng không tầm ngắn kiểu Pantsir-SM? Nhưng trong thực tế, địa hình không bằng phẳng, rừng, tòa nhà và các chướng ngại vật tự nhiên và nhân tạo khác sẽ làm giảm giá trị này vài lần.
Độ cao tối thiểu mà radar phải nâng lên để đảm bảo phát hiện các mục tiêu bay thấp là bao nhiêu?
Độ cao mà phương tiện phát hiện phải được nâng lên để bù đắp cho địa hình không bằng phẳng có thể thay đổi tùy theo từng trường hợp. Trong hầu hết các trường hợp, chênh lệch độ cao trên lãnh thổ bằng phẳng của Nga trong phạm vi 100-200 km là không quá 100-200 mét. Ở các khu vực miền núi, sự khác biệt có thể lớn hơn đáng kể và rất khó để chỉ ra bất kỳ giá trị cụ thể nào.
Thông thường, đối với hệ thống phòng không tầm ngắn (lên đến 40-50 km), có thể lấy độ cao cần thiết để bù đắp cho địa hình không bằng phẳng là 100 mét, đối với hệ thống phòng không tầm trung (lên đến 50-150 km) , chiều cao cần thiết để bù đắp cho địa hình không bằng phẳng sẽ là 200 mét.
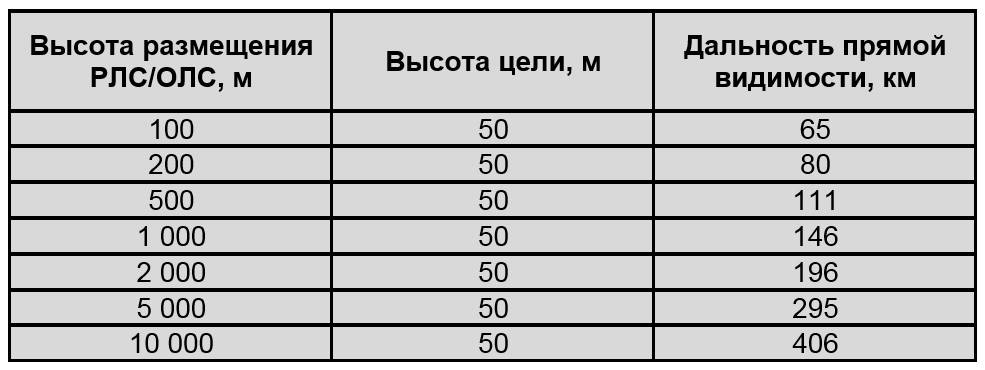
Như vậy, độ cao tối thiểu để bố trí radar phát hiện mục tiêu bay thấp đối với hệ thống phòng không tầm ngắn là khoảng 200 mét, đối với hệ thống phòng không tầm trung là khoảng 700 mét. Độ cao của đài radar để đảm bảo hoạt động trên đường chân trời của các hệ thống phòng không tầm xa nên có thể so sánh với độ cao bay của máy bay AWACS, khoảng 10 m, trong trường hợp này, địa hình đóng một vai trò nhỏ hơn nhiều.
Những độ cao này khiến việc sử dụng PMU là không thể, nhưng có một số cách khác để "nhìn xa hơn đường chân trời".
Một trong những phương pháp này là sử dụng bóng bay. Dự án JLENS đang được thực hiện tại Hoa Kỳ. Trong khuôn khổ dự án này, dự kiến đặt thiết bị trinh sát quang học và radar trên khinh khí cầu cố định tại các điểm nhất định trong nước và được thiết kế để phát hiện tên lửa hành trình bay thấp. Chiều cao của bóng bay từ 3 - 4,5 km, trọng tải khoảng ba tấn. Phạm vi phát hiện mục tiêu trên không khoảng 550 km, mục tiêu mặt đất khoảng 225 km. Ngoài khả năng phát hiện, khinh khí cầu JLENS phải cung cấp chỉ định mục tiêu trên đường chân trời cho tên lửa đất đối không. Để giữ khinh khí cầu ở vị trí và trao đổi dữ liệu, người ta dự kiến sử dụng một loại cáp bao gồm cáp nguồn và cáp dữ liệu sợi quang trong một vỏ bọc carbon.

Trong khuôn khổ nhiệm vụ chúng tôi đang xem xét, dự án này có một số nhược điểm: khinh khí cầu không thuận tiện cho việc di chuyển liên tục bằng đường bộ, và nếu có thể, nó phải được gắn với một điểm nhất định, loại trừ khả năng thay đổi vị trí bằng thiết bị di động hệ thống phòng không và là không thể chấp nhận được. Ngoài ra, kích thước khổng lồ của khinh khí cầu (dài hơn 70 mét) về mặt lý thuyết có thể ngăn cản hoạt động của nó trong điều kiện gió giật mạnh.
Mặt khác, bản thân khái niệm này khá hứa hẹn. Radar đặt trên khinh khí cầu có thể bao phủ các vật thể đứng yên khỏi các cuộc tấn công IOS bay thấp, chủ yếu như mìn cho tên lửa đạn đạo xuyên lục địa (ICBM), căn cứ tàu ngầm, tàu sân bay tên lửa đạn đạo, sân bay máy bay ném bom chiến lược, nhà máy điện hạt nhân và các yếu tố quan trọng khác của lực lượng vũ trang đất nước và cơ sở hạ tầng.
Vì vậy, mặc dù bóng bay không phải là phương tiện tốt nhất để cung cấp cho hệ thống phòng không khả năng đánh trúng mục tiêu ở đường chân trời, nhưng chúng có thể đóng một vai trò quan trọng trong việc bao phủ các vật thể đứng yên trước cuộc tấn công bất ngờ của hệ thống phòng không bay thấp của đối phương. . Ưu điểm chính của chúng là khả năng ở trong không khí gần như liên tục mà không tốn nhiều nhiên liệu và điện.
Ở Nga, những quả bóng bay như vậy đang được phát triển bởi RosAeroSystems. Trong đó, chúng ta có thể kể đến khinh khí cầu PUMA gắn kết khối lượng lớn. Khí cầu Puma được thiết kế như một tàu sân bay radar để giám sát radar suốt ngày đêm từ độ cao 5 km trong 30 ngày mà không cần hạ cánh.
Bán kính phát hiện và theo dõi các mục tiêu trên không ước tính sẽ là 300-350 km. Khí cầu phải chịu được sức gió bão lên tới 46 m / s và các tia sét trực tiếp. Khí cầu được giữ bằng dây cáp trong quá trình đi lên, xuống và đỗ ở độ cao làm việc, nó cũng cung cấp năng lượng cho các hệ thống trên tàu và tải trọng với công suất lên đến 40 kW, cũng như loại bỏ sét và tĩnh điện. điện lực. Trọng tải của khinh khí cầu PUMA lên tới 2250 kg.

Rõ ràng, các lực lượng vũ trang của Liên bang Nga đang làm việc theo hướng này:
Điều đó tùy thuộc vào mối quan tâm của Almaz-Antey, điều cần thiết là khinh khí cầu và khí cầu không chỉ có thể cảnh báo về mối đe dọa của một cuộc tấn công trên không mà còn cả tên lửa dẫn đường phòng không (SAM) được trang bị đầu dẫn radar chủ động (ARGSN) tại mục tiêu đã xác định.
Hãy quay lại SAM. Để bắt đầu, chúng ta hãy xem xét các hệ thống phòng không tầm ngắn và tầm trung, yêu cầu nâng radar lên độ cao lần lượt là 200 và 700 mét.
Vào đầu năm 2018, Boeing đã giới thiệu một nguyên mẫu máy bay chở hàng không người lái chạy bằng điện. UAV này được thiết kế để thử nghiệm và gỡ lỗi các công nghệ cần thiết để tạo ra thế hệ máy bay chở hàng và chở khách tiếp theo. Chiều dài của nguyên mẫu UAV là 4,57 mét, rộng 5,49 mét, cao 1,22 mét, trọng lượng, bao gồm cả trọng lượng của pin, là 339 kg. Tải trọng - lên đến 226 kg. Thiết kế bao gồm bốn động cơ điện với tám cánh quạt.
Trình bày về chiếc máy bay chở hàng Boeing quadrocopter
Các máy bay quadcopters-UAV điện có thể là một giải pháp hiệu quả để phát hiện EOS bay thấp cho các hệ thống phòng không trên mặt đất và trên biển.
Một quadcopter-UAV chạy điện phải được đặt trên phương tiện vận chuyển, tổ máy phát điện diesel (DGU) cũng phải được đặt ở đó để cung cấp điện cho UAV. Thật không may, hiện tại, vẫn chưa rõ sức mạnh của động cơ điện của chiếc quadcopter thử nghiệm, thời gian sạc pin và thời gian bay.
Hai lựa chọn có thể được xem xét:
- Trong phương án thứ nhất, không có ắc quy cần thiết để duy trì chuyến bay dài, nguồn điện được cung cấp từ phương tiện vận chuyển, chỉ có một ắc quy nhỏ dự phòng cho UAV hạ cánh khẩn cấp, có lẽ, phương án này có thể được coi là tối ưu;
- tùy chọn thứ hai có thể được sử dụng nếu khối lượng của cáp cần thiết để cung cấp nguồn điện cần thiết cho quadcopter quá lớn, trong trường hợp này, quadcopter nên được trang bị pin sạc hoặc siêu tụ điện (ionistors) có chức năng sạc nhanh.
Để đảm bảo tính liên tục trên không, bốn hệ thống phòng không tầm ngắn cần ít nhất hai phương tiện mang UAV. Thời gian UAV ở trên không sẽ chỉ bị giới hạn bởi sự sẵn có của nhiên liệu cho DGU.
Thay vì sử dụng quadcopter điện, một UAV dựa trên động cơ piston xăng hoặc diesel có thể được thực hiện. Tại Nga, việc phát triển và sản xuất các giải pháp như vậy được thực hiện bởi công ty SKYF Technology, công ty cung cấp UAV cất và hạ cánh thẳng đứng SKYF cho khách hàng. Hiện tại, sức chở của UAV SKYF là 250 kg với triển vọng tăng lên 400 kg. Độ cao bay của UAV này lên tới 3000 mét.

SKYF UAV Flight Trình diễn
Trình bày về UAV SKYF
Trước đó, Gorizont đã công bố UAV loại trực thăng Horizon Air S-100 với radar toàn năng, dựa trên Schiebel Camcopter S-100 của Áo. Radar toàn năng Kolibri gắn trên UAV này, được lắp đặt ở phần dưới của thân máy bay, đang được phát triển cùng với Viện Nghiên cứu Khoa học về Vật lý phóng xạ Moscow. Tổng khối lượng của thiết bị radar không được quá 6,5 kg, tầm bắn cần thiết ở chế độ ngắm toàn cảnh (UAV bay lượn) tối thiểu là 200 km, ở chế độ khẩu độ tổng hợp tối thiểu là 20 km.
Trọng tải của chiếc UAV này quá nhỏ (35 kg) để có thể chứa một radar có các đặc tính có thể chấp nhận được, nhưng nó có thể là một khái niệm thú vị. Thời gian ở trên không liên tục là 6 giờ.

Các ví dụ đã cho về quadcopters-UAV không thể được sử dụng trực tiếp để triển khai radar, vì chúng có trọng tải tương đối khiêm tốn, nhưng chắc chắn rằng thiết kế của chúng sẽ được phát triển và cải tiến tích cực. Trước hết, điều này áp dụng cho các máy bay quadrocopters-UAV.
Yêu cầu chính đối với UAV AWACS của loại máy bay quadrocopter hoặc UAV-AWACS của loại trực thăng phải có độ tin cậy cao và khả năng ở trên không lâu dài, đồng thời đảm bảo hiệu suất bay quy định (LTH), cũng như hoạt động cao. tài nguyên và chi phí thấp cho mỗi giờ bay.
Đối với các hệ thống phòng không tầm xa, UAV cất và hạ cánh thẳng đứng sẽ không còn là phương tiện trinh sát hiệu quả và đầy đủ nữa, vì độ cao của radar, để đạt được tầm quan sát khoảng 400 km, phải vượt quá 10. mét.
Có lẽ, như một radar bay cho các hệ thống phòng không tầm xa, các UAV có thời gian bay dài, loại máy bay, kích thước trung bình hoặc lớn có thể được sử dụng.
Một trong những ứng cử viên cho vai diễn triển vọng máy bay không người lái-DRLO có thể trở thành một Altair UAV với trọng lượng cất cánh 5 tấn và tải trọng 1-2 tấn. UAV này đang được tạo ra như một phần của dự án nghiên cứu Altius-M tại Cục thiết kế Sokol (Kazan) cùng với công ty Transas. Thời gian bay của nó lên tới 48 giờ, tầm bay 10 km. Năm 000, chương trình UAV Altair đã được chuyển giao cho Nhà máy dân dụng Ural. hàng không"(UZGA). Các cuộc thử nghiệm bay của UAV Altair sẽ bắt đầu vào năm 2019.

Các thiết bị kiểu này đang được phát triển ở các nước khác. Đặc biệt, công ty CETC của Trung Quốc đang phát triển UAV JY-300. Một thiết bị cỡ trung bình phải trở thành vật mang ăng ten phù hợp và hoạt động như một AWACS không người lái. Theo dữ liệu sơ bộ, JY-300 UAV có trọng lượng cất cánh khoảng 1300 kg và có thể mang tải trọng 400 kg. Nó có khả năng bay tới 12 giờ ở độ cao 7,6 km. Các radar được tích hợp trong thiết kế của máy bay không người lái này sẽ cho phép phát hiện các mục tiêu trên không và trên biển ở khoảng cách xa.

Các UAV cỡ trung và cỡ lớn của Nga đang gặp phải nhiều vấn đề, trong đó có việc thiếu động cơ nội địa nhỏ gọn, mạnh mẽ và tiết kiệm, thiếu hệ thống điện tử hàng không hiện đại. Một trong những vấn đề quan trọng nhất là thiếu các kênh truyền dữ liệu vệ tinh tốc độ cao với phạm vi toàn cầu, cho phép điều khiển UAV và nhận thông tin tình báo từ nó ở khoảng cách rất xa so với căn cứ địa.
Việc sử dụng các UAV AWACS với thời gian bay dài không yêu cầu sự hiện diện bắt buộc của các kênh đó. Nói chung, hoạt động của tổ hợp hệ thống phòng không tầm xa - UAV tầm xa có thể trông như thế này:
Một UAV AWACS tầm xa cất cánh từ sân bay và đi vào khu vực tuần tra qua các vị trí của hệ thống phòng không nhiều lớp. Tất cả thông tin từ nó được gửi đến người vận hành các hệ thống phòng không tầm xa, và xa hơn nữa, thông qua điểm điều khiển chiến đấu, tới người vận hành các hệ thống phòng không khác nằm trong hệ thống phòng không phân lớp chung. Chuyến bay của UAV nên được thực hiện phần lớn ở chế độ tự động dọc theo một quỹ đạo nhất định. Một hệ thống phòng không tầm xa nên bao gồm hai AWACS. Trong trường hợp này, họ có thể thực hiện nhiệm vụ chiến đấu theo ca trên các vị trí của hệ thống phòng không trong thời gian 36-48 giờ, tùy thuộc vào độ xa của sân bay gia đình.
Các yêu cầu đối với UAV AWACS tầm xa cũng giống như đối với UAV dành cho hệ thống phòng không tầm ngắn và tầm trung - nguồn lực tác chiến cao và chi phí cho mỗi giờ bay thấp.
Một câu hỏi có thể nảy sinh: tiêu đề của bài báo đề cập đến hoạt động của hệ thống phòng không đối với các mục tiêu bay thấp mà không có sự tham gia của lực lượng hàng không Không quân, và các UAV có thời gian bay dài rõ ràng có liên quan đến hàng không. Ở đây câu hỏi là liên quan đến bộ phận. Tại Hoa Kỳ, theo thỏa thuận Johnson-McConnell giữa lục quân và Không quân, máy bay trực thăng không thuộc Lực lượng Không quân và trực thuộc Quân đội Hoa Kỳ, hành động vì lợi ích của nó (việc phân chia máy bay ở Hoa Kỳ giữa quân đội và không quân được viết tốt đây). Vì vậy, trong trường hợp của chúng tôi, thực tế là UAV thuộc một hệ thống phòng không cụ thể sẽ không cho phép Không quân sử dụng nó cho các mục đích khác.
Việc sử dụng các UAV AWACS loại quadcopter và các UAV AWACS tầm xa sẽ tạo ra vùng phủ sóng radar dày đặc trong khu vực và cung cấp khả năng chỉ định mục tiêu cho các tên lửa có ARGSN và IR tìm kiếm ở cự ly tối đa.
Có lẽ, đối với hai hệ thống phòng không tầm ngắn, cần có một phương tiện với AWACS loại quadcopter hoặc hai phương tiện cho bốn hệ thống phòng không. Hệ thống phòng không tầm trung nên bao gồm hai phương tiện với AWACS kiểu quadrocopter. Hai UAV AWACS tầm xa nên được xếp vào hệ thống phòng không tầm xa.
Trong thời kỳ bị đe dọa hoặc trong trường hợp bùng nổ chiến sự, các UAV tầm xa phải thực hiện các cuộc tuần tra liên tục trên các vị trí của hệ thống phòng không. Các UAV thuộc loại quadrocopter, từ thành phần của hệ thống phòng không tầm ngắn và tầm trung, phải ở trên các phương tiện vận tải trong tình trạng sẵn sàng phóng ngay lập tức. Trong trường hợp phát hiện mối đe dọa trên không, việc phóng UAV kiểu quadrocopter nên được thực hiện trong vòng vài phút.
Chi phí của bản thân các UAV và thời gian bay của chúng theo truyền thống thấp hơn đáng kể so với chi phí của máy bay có người lái và máy bay trực thăng, điều này làm cho nhiệm vụ này trở nên hấp dẫn về mặt kinh tế. Khái niệm đề xuất về mặt kỹ thuật cũng không chứa các vấn đề không thể vượt qua.
Đối với các vật thể tĩnh có tầm quan trọng cao, có thể sử dụng bóng bay AWACS. Trong trường hợp phòng không các đối tượng được trang bị khinh khí cầu AWACS, không cần sử dụng UAV thời gian dài và có thể bị loại khỏi hệ thống phòng không tầm xa hoặc có thể ở sân bay sẵn sàng cất cánh như một phương tiện dự phòng để trinh sát và xác định mục tiêu. sự chỉ định.
Trước đây, người ta chỉ xem xét đến việc sử dụng AWACS UAV vì lợi ích của các hệ thống phòng không trên mặt đất. Nhưng không kém, và có lẽ nhiệm vụ quan trọng hơn là việc sử dụng các UAV AWACS kiểu quadcopter và các UAV có thời gian bay dài phục vụ cho nhiệm vụ phòng không của các tàu hải quân. hạm đội (Hải quân). Với thực tế là chúng ta không có tàu sân bay và do đó, trên đó có các máy bay AWACS, các tàu chiến hiện đại của Nga được bảo vệ kém hơn trước các cuộc tấn công trên không, bất kể chúng có loại phòng không nào, do hạn chế vật lý về phạm vi phát hiện thấp- mục tiêu bay.
Việc sử dụng các UAV kiểu quadrocopter trên các tàu của Hải quân Nga sẽ đẩy lùi đáng kể ranh giới tiêu diệt các mục tiêu bay thấp. Và việc gửi các UAV với thời gian bay dài và tầm bay đến khu vực có tàu của Hải quân sẽ giúp họ có thêm cơ hội để trinh sát các lực lượng đối phương và đưa ra chỉ định mục tiêu cho tên lửa. vũ khí tầm xa.

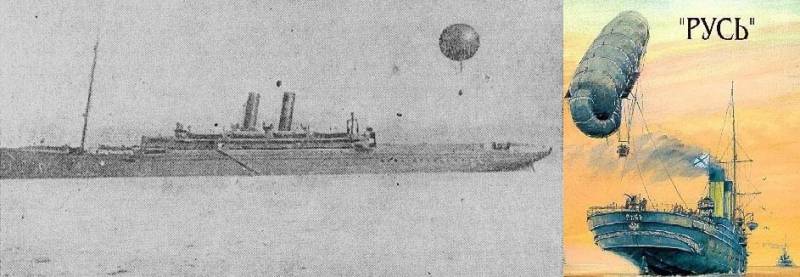
Không thể loại trừ việc sử dụng khinh khí cầu và khí cầu AWACS vì lợi ích của Hải quân, đặc biệt là kể từ khi lịch sử có những ví dụ về việc sử dụng khinh khí cầu của hạm đội Nga.
Hệ thống phòng không trên bộ và trên bộ nếu không có khả năng tấn công các mục tiêu bay thấp ở khoảng cách xa sẽ bị đánh bại.
Để giải quyết vấn đề này, vì lợi ích của các hệ thống phòng không tầm ngắn và tầm trung, cần phải tạo ra một UAV AWACS kiểu quadcopter, tốt nhất là được cung cấp điện qua cáp từ phương tiện vận tải.
Đối với hệ thống phòng không tầm xa, cần tăng cường phát triển các UAV AWACS tầm xa.
Đối với các vật thể tĩnh có tầm quan trọng cao, có thể sử dụng bóng bay AWACS.
Tất cả các hệ thống trên (UAV AWACS kiểu quadcopter, UAV AWACS thời gian dài và khí cầu AWACS) đều có tầm quan trọng lớn đối với việc nâng cao hiệu quả và khả năng tồn tại của không chỉ các hệ thống phòng không trên mặt đất mà còn cả các tàu của Hải quân Nga.
leo lên cao hơn
Một lựa chọn là đặt radar trên thiết bị nâng cột buồm (PMU). Nếu chúng ta đặt radar ở độ cao 15 mét, thì phạm vi quan sát của máy bay (LA) di chuyển ở độ cao 50 mét so với bề mặt sẽ là 41 km. Tăng chiều cao PMU lên 50 mét sẽ làm tăng phạm vi quan sát lý thuyết chỉ 13 km (lên đến 54 km), trong khi độ phức tạp và cồng kềnh của thiết bị này sẽ tăng lên ở mức độ lớn hơn nhiều.
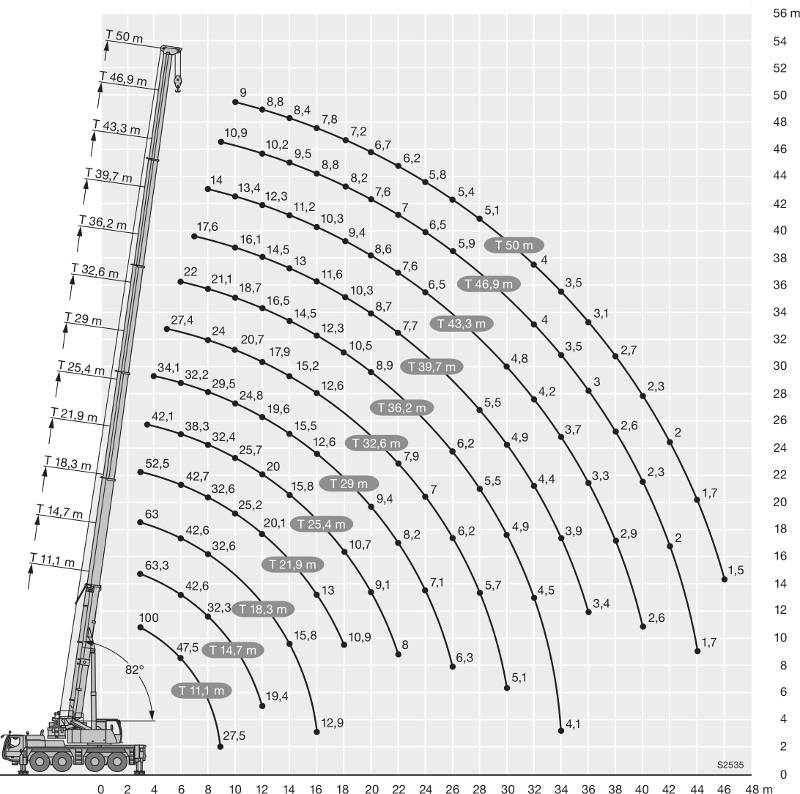
Khả năng của cần cẩu xe tải hiện đại giúp nó có thể nâng một vật nặng 9 tấn lên độ cao 50 mét, điều này có thể đặt các radar trên một PMU có thiết kế tương tự để phát hiện các mục tiêu bay thấp
Có vẻ như đó là điều khá bình thường đối với các hệ thống phòng không tầm ngắn kiểu Pantsir-SM? Nhưng trong thực tế, địa hình không bằng phẳng, rừng, tòa nhà và các chướng ngại vật tự nhiên và nhân tạo khác sẽ làm giảm giá trị này vài lần.
Độ cao tối thiểu mà radar phải nâng lên để đảm bảo phát hiện các mục tiêu bay thấp là bao nhiêu?
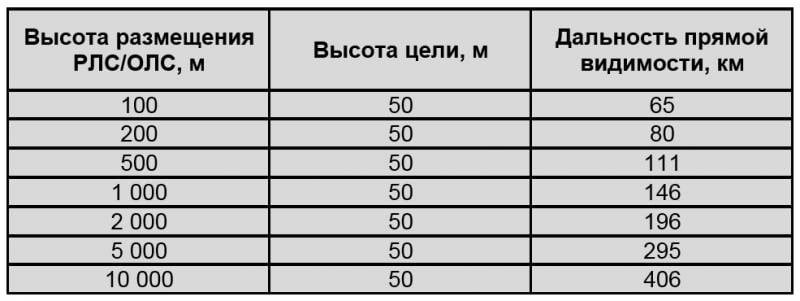
Phạm vi đường ngắm tùy thuộc vào độ cao của phương tiện phát hiện, không tính đến địa hình
Độ cao mà phương tiện phát hiện phải được nâng lên để bù đắp cho địa hình không bằng phẳng có thể thay đổi tùy theo từng trường hợp. Trong hầu hết các trường hợp, chênh lệch độ cao trên lãnh thổ bằng phẳng của Nga trong phạm vi 100-200 km là không quá 100-200 mét. Ở các khu vực miền núi, sự khác biệt có thể lớn hơn đáng kể và rất khó để chỉ ra bất kỳ giá trị cụ thể nào.
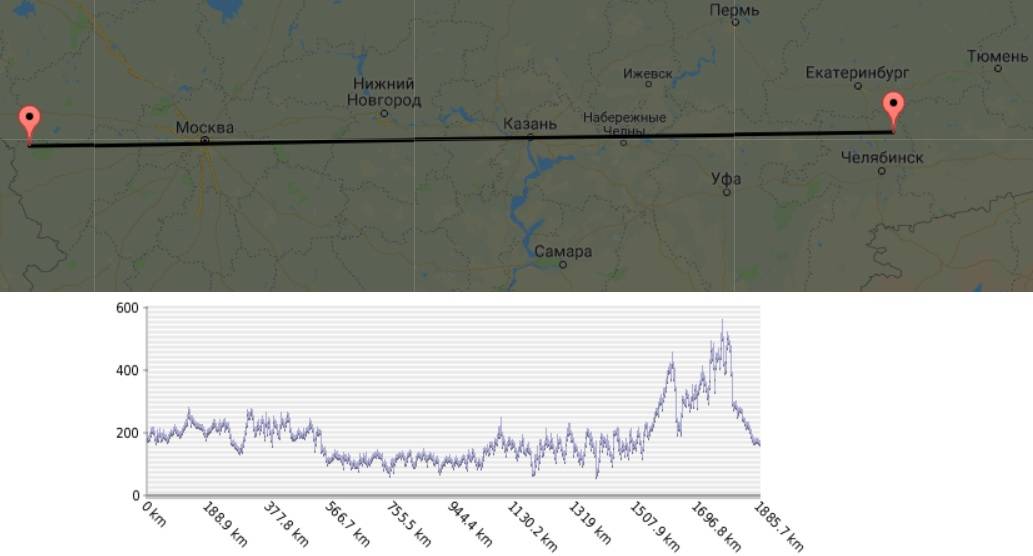
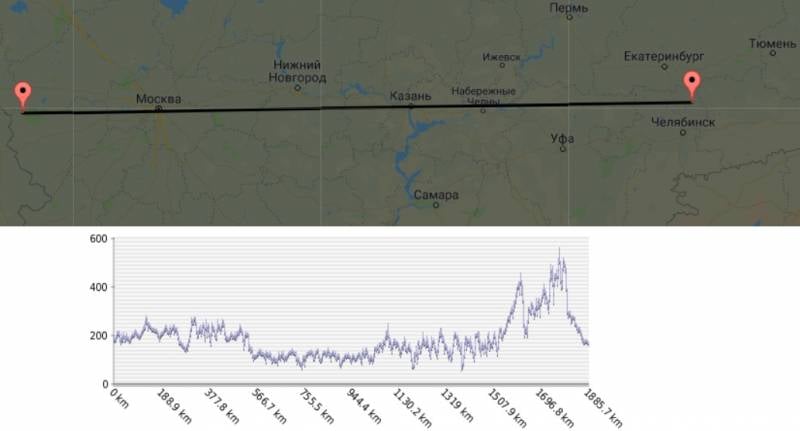
Cấu hình độ cao
Thông thường, đối với hệ thống phòng không tầm ngắn (lên đến 40-50 km), có thể lấy độ cao cần thiết để bù đắp cho địa hình không bằng phẳng là 100 mét, đối với hệ thống phòng không tầm trung (lên đến 50-150 km) , chiều cao cần thiết để bù đắp cho địa hình không bằng phẳng sẽ là 200 mét.
Như vậy, độ cao tối thiểu để bố trí radar phát hiện mục tiêu bay thấp đối với hệ thống phòng không tầm ngắn là khoảng 200 mét, đối với hệ thống phòng không tầm trung là khoảng 700 mét. Độ cao của đài radar để đảm bảo hoạt động trên đường chân trời của các hệ thống phòng không tầm xa nên có thể so sánh với độ cao bay của máy bay AWACS, khoảng 10 m, trong trường hợp này, địa hình đóng một vai trò nhỏ hơn nhiều.
Những độ cao này khiến việc sử dụng PMU là không thể, nhưng có một số cách khác để "nhìn xa hơn đường chân trời".
Radar trên khinh khí cầu
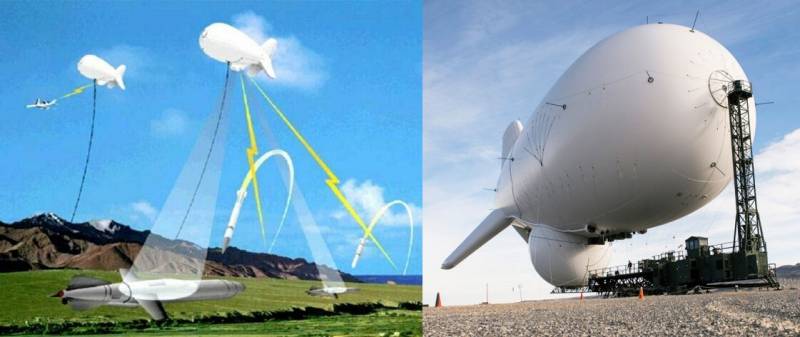
Một trong những phương pháp này là sử dụng bóng bay. Dự án JLENS đang được thực hiện tại Hoa Kỳ. Trong khuôn khổ dự án này, dự kiến đặt thiết bị trinh sát quang học và radar trên khinh khí cầu cố định tại các điểm nhất định trong nước và được thiết kế để phát hiện tên lửa hành trình bay thấp. Chiều cao của bóng bay từ 3 - 4,5 km, trọng tải khoảng ba tấn. Phạm vi phát hiện mục tiêu trên không khoảng 550 km, mục tiêu mặt đất khoảng 225 km. Ngoài khả năng phát hiện, khinh khí cầu JLENS phải cung cấp chỉ định mục tiêu trên đường chân trời cho tên lửa đất đối không. Để giữ khinh khí cầu ở vị trí và trao đổi dữ liệu, người ta dự kiến sử dụng một loại cáp bao gồm cáp nguồn và cáp dữ liệu sợi quang trong một vỏ bọc carbon.
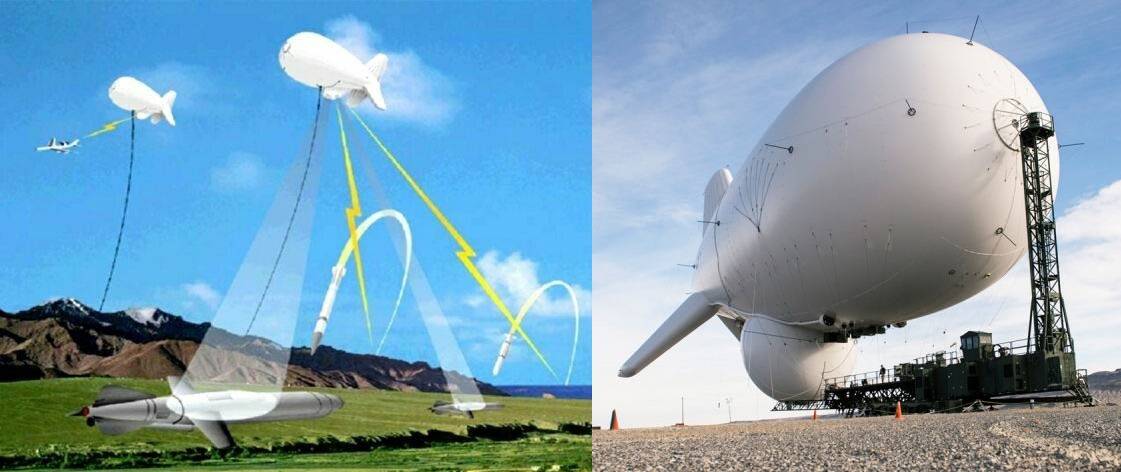
Nguyên lý hoạt động và bản thân khinh khí cầu của dự án JLENS

Máy dệt sơ bộ sợi carbon, cũng có thể tạo ra vỏ bọc dây có độ bền cao
Trong khuôn khổ nhiệm vụ chúng tôi đang xem xét, dự án này có một số nhược điểm: khinh khí cầu không thuận tiện cho việc di chuyển liên tục bằng đường bộ, và nếu có thể, nó phải được gắn với một điểm nhất định, loại trừ khả năng thay đổi vị trí bằng thiết bị di động hệ thống phòng không và là không thể chấp nhận được. Ngoài ra, kích thước khổng lồ của khinh khí cầu (dài hơn 70 mét) về mặt lý thuyết có thể ngăn cản hoạt động của nó trong điều kiện gió giật mạnh.
Mặt khác, bản thân khái niệm này khá hứa hẹn. Radar đặt trên khinh khí cầu có thể bao phủ các vật thể đứng yên khỏi các cuộc tấn công IOS bay thấp, chủ yếu như mìn cho tên lửa đạn đạo xuyên lục địa (ICBM), căn cứ tàu ngầm, tàu sân bay tên lửa đạn đạo, sân bay máy bay ném bom chiến lược, nhà máy điện hạt nhân và các yếu tố quan trọng khác của lực lượng vũ trang đất nước và cơ sở hạ tầng.
Vì vậy, mặc dù bóng bay không phải là phương tiện tốt nhất để cung cấp cho hệ thống phòng không khả năng đánh trúng mục tiêu ở đường chân trời, nhưng chúng có thể đóng một vai trò quan trọng trong việc bao phủ các vật thể đứng yên trước cuộc tấn công bất ngờ của hệ thống phòng không bay thấp của đối phương. . Ưu điểm chính của chúng là khả năng ở trong không khí gần như liên tục mà không tốn nhiều nhiên liệu và điện.
Ở Nga, những quả bóng bay như vậy đang được phát triển bởi RosAeroSystems. Trong đó, chúng ta có thể kể đến khinh khí cầu PUMA gắn kết khối lượng lớn. Khí cầu Puma được thiết kế như một tàu sân bay radar để giám sát radar suốt ngày đêm từ độ cao 5 km trong 30 ngày mà không cần hạ cánh.
Bán kính phát hiện và theo dõi các mục tiêu trên không ước tính sẽ là 300-350 km. Khí cầu phải chịu được sức gió bão lên tới 46 m / s và các tia sét trực tiếp. Khí cầu được giữ bằng dây cáp trong quá trình đi lên, xuống và đỗ ở độ cao làm việc, nó cũng cung cấp năng lượng cho các hệ thống trên tàu và tải trọng với công suất lên đến 40 kW, cũng như loại bỏ sét và tĩnh điện. điện lực. Trọng tải của khinh khí cầu PUMA lên tới 2250 kg.
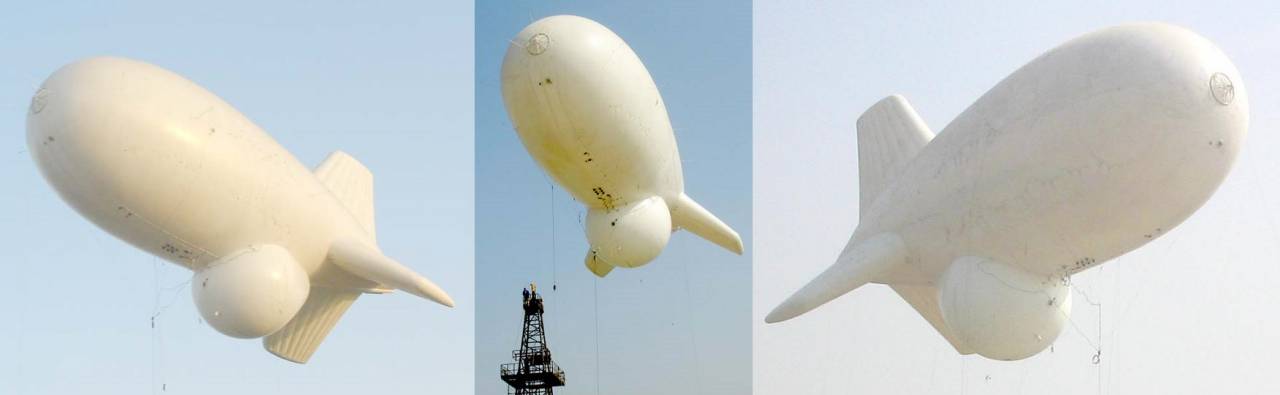
Bong bóng có dây buộc khối lượng lớn "PUMA"
Rõ ràng, các lực lượng vũ trang của Liên bang Nga đang làm việc theo hướng này:
Vào tháng 2015 năm XNUMX, Vladimir Mikheev, Cố vấn của Phó Tổng Giám đốc thứ nhất của Mối quan tâm về Công nghệ Vô tuyến Điện tử (KRET), nói với RIA tin tức về việc bắt đầu thực hiện dự án khí cầu phục vụ nhu cầu phòng thủ tên lửa của đất nước. Nó có thể trở thành một phần tử chính thức của hệ thống cảnh báo tấn công tên lửa (SPRN), ngày nay bao gồm hai tổ hợp - một chòm sao vệ tinh quỹ đạo và các trạm radar trên mặt đất.
Điều đó tùy thuộc vào mối quan tâm của Almaz-Antey, điều cần thiết là khinh khí cầu và khí cầu không chỉ có thể cảnh báo về mối đe dọa của một cuộc tấn công trên không mà còn cả tên lửa dẫn đường phòng không (SAM) được trang bị đầu dẫn radar chủ động (ARGSN) tại mục tiêu đã xác định.
Máy bay Quadcopters và các phương tiện bay không người lái (UAV) khác để cất cánh và hạ cánh thẳng đứng
Hãy quay lại SAM. Để bắt đầu, chúng ta hãy xem xét các hệ thống phòng không tầm ngắn và tầm trung, yêu cầu nâng radar lên độ cao lần lượt là 200 và 700 mét.
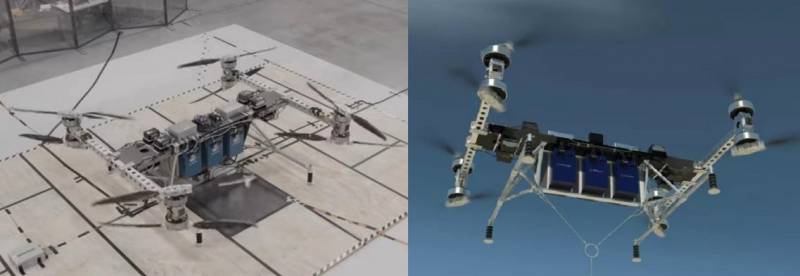
Vào đầu năm 2018, Boeing đã giới thiệu một nguyên mẫu máy bay chở hàng không người lái chạy bằng điện. UAV này được thiết kế để thử nghiệm và gỡ lỗi các công nghệ cần thiết để tạo ra thế hệ máy bay chở hàng và chở khách tiếp theo. Chiều dài của nguyên mẫu UAV là 4,57 mét, rộng 5,49 mét, cao 1,22 mét, trọng lượng, bao gồm cả trọng lượng của pin, là 339 kg. Tải trọng - lên đến 226 kg. Thiết kế bao gồm bốn động cơ điện với tám cánh quạt.
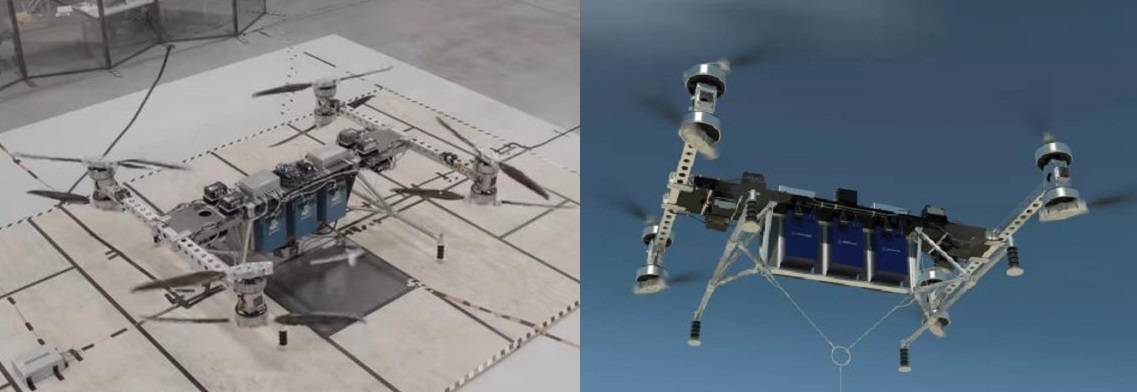
Boeing chở hàng quadcopter
Trình bày về chiếc máy bay chở hàng Boeing quadrocopter
Các máy bay quadcopters-UAV điện có thể là một giải pháp hiệu quả để phát hiện EOS bay thấp cho các hệ thống phòng không trên mặt đất và trên biển.
Một quadcopter-UAV chạy điện phải được đặt trên phương tiện vận chuyển, tổ máy phát điện diesel (DGU) cũng phải được đặt ở đó để cung cấp điện cho UAV. Thật không may, hiện tại, vẫn chưa rõ sức mạnh của động cơ điện của chiếc quadcopter thử nghiệm, thời gian sạc pin và thời gian bay.
Hai lựa chọn có thể được xem xét:
- Trong phương án thứ nhất, không có ắc quy cần thiết để duy trì chuyến bay dài, nguồn điện được cung cấp từ phương tiện vận chuyển, chỉ có một ắc quy nhỏ dự phòng cho UAV hạ cánh khẩn cấp, có lẽ, phương án này có thể được coi là tối ưu;
- tùy chọn thứ hai có thể được sử dụng nếu khối lượng của cáp cần thiết để cung cấp nguồn điện cần thiết cho quadcopter quá lớn, trong trường hợp này, quadcopter nên được trang bị pin sạc hoặc siêu tụ điện (ionistors) có chức năng sạc nhanh.
Để đảm bảo tính liên tục trên không, bốn hệ thống phòng không tầm ngắn cần ít nhất hai phương tiện mang UAV. Thời gian UAV ở trên không sẽ chỉ bị giới hạn bởi sự sẵn có của nhiên liệu cho DGU.
Thay vì sử dụng quadcopter điện, một UAV dựa trên động cơ piston xăng hoặc diesel có thể được thực hiện. Tại Nga, việc phát triển và sản xuất các giải pháp như vậy được thực hiện bởi công ty SKYF Technology, công ty cung cấp UAV cất và hạ cánh thẳng đứng SKYF cho khách hàng. Hiện tại, sức chở của UAV SKYF là 250 kg với triển vọng tăng lên 400 kg. Độ cao bay của UAV này lên tới 3000 mét.

UAV xăng cất cánh và hạ cánh thẳng đứng
SKYF UAV Flight Trình diễn
Trình bày về UAV SKYF
Trước đó, Gorizont đã công bố UAV loại trực thăng Horizon Air S-100 với radar toàn năng, dựa trên Schiebel Camcopter S-100 của Áo. Radar toàn năng Kolibri gắn trên UAV này, được lắp đặt ở phần dưới của thân máy bay, đang được phát triển cùng với Viện Nghiên cứu Khoa học về Vật lý phóng xạ Moscow. Tổng khối lượng của thiết bị radar không được quá 6,5 kg, tầm bắn cần thiết ở chế độ ngắm toàn cảnh (UAV bay lượn) tối thiểu là 200 km, ở chế độ khẩu độ tổng hợp tối thiểu là 20 km.
Trọng tải của chiếc UAV này quá nhỏ (35 kg) để có thể chứa một radar có các đặc tính có thể chấp nhận được, nhưng nó có thể là một khái niệm thú vị. Thời gian ở trên không liên tục là 6 giờ.

UAV loại trực thăng của công ty "Horizon" với radar toàn năng
Các ví dụ đã cho về quadcopters-UAV không thể được sử dụng trực tiếp để triển khai radar, vì chúng có trọng tải tương đối khiêm tốn, nhưng chắc chắn rằng thiết kế của chúng sẽ được phát triển và cải tiến tích cực. Trước hết, điều này áp dụng cho các máy bay quadrocopters-UAV.
Yêu cầu chính đối với UAV AWACS của loại máy bay quadrocopter hoặc UAV-AWACS của loại trực thăng phải có độ tin cậy cao và khả năng ở trên không lâu dài, đồng thời đảm bảo hiệu suất bay quy định (LTH), cũng như hoạt động cao. tài nguyên và chi phí thấp cho mỗi giờ bay.
UAV tầm cao
Đối với các hệ thống phòng không tầm xa, UAV cất và hạ cánh thẳng đứng sẽ không còn là phương tiện trinh sát hiệu quả và đầy đủ nữa, vì độ cao của radar, để đạt được tầm quan sát khoảng 400 km, phải vượt quá 10. mét.
Có lẽ, như một radar bay cho các hệ thống phòng không tầm xa, các UAV có thời gian bay dài, loại máy bay, kích thước trung bình hoặc lớn có thể được sử dụng.
Một trong những ứng cử viên cho vai diễn triển vọng máy bay không người lái-DRLO có thể trở thành một Altair UAV với trọng lượng cất cánh 5 tấn và tải trọng 1-2 tấn. UAV này đang được tạo ra như một phần của dự án nghiên cứu Altius-M tại Cục thiết kế Sokol (Kazan) cùng với công ty Transas. Thời gian bay của nó lên tới 48 giờ, tầm bay 10 km. Năm 000, chương trình UAV Altair đã được chuyển giao cho Nhà máy dân dụng Ural. hàng không"(UZGA). Các cuộc thử nghiệm bay của UAV Altair sẽ bắt đầu vào năm 2019.

Nguyên mẫu UAV Altair
Các thiết bị kiểu này đang được phát triển ở các nước khác. Đặc biệt, công ty CETC của Trung Quốc đang phát triển UAV JY-300. Một thiết bị cỡ trung bình phải trở thành vật mang ăng ten phù hợp và hoạt động như một AWACS không người lái. Theo dữ liệu sơ bộ, JY-300 UAV có trọng lượng cất cánh khoảng 1300 kg và có thể mang tải trọng 400 kg. Nó có khả năng bay tới 12 giờ ở độ cao 7,6 km. Các radar được tích hợp trong thiết kế của máy bay không người lái này sẽ cho phép phát hiện các mục tiêu trên không và trên biển ở khoảng cách xa.

Nguyên mẫu UAV AWACS JY-300 Công ty Trung Quốc CETC
Các UAV cỡ trung và cỡ lớn của Nga đang gặp phải nhiều vấn đề, trong đó có việc thiếu động cơ nội địa nhỏ gọn, mạnh mẽ và tiết kiệm, thiếu hệ thống điện tử hàng không hiện đại. Một trong những vấn đề quan trọng nhất là thiếu các kênh truyền dữ liệu vệ tinh tốc độ cao với phạm vi toàn cầu, cho phép điều khiển UAV và nhận thông tin tình báo từ nó ở khoảng cách rất xa so với căn cứ địa.
Việc sử dụng các UAV AWACS với thời gian bay dài không yêu cầu sự hiện diện bắt buộc của các kênh đó. Nói chung, hoạt động của tổ hợp hệ thống phòng không tầm xa - UAV tầm xa có thể trông như thế này:
Một UAV AWACS tầm xa cất cánh từ sân bay và đi vào khu vực tuần tra qua các vị trí của hệ thống phòng không nhiều lớp. Tất cả thông tin từ nó được gửi đến người vận hành các hệ thống phòng không tầm xa, và xa hơn nữa, thông qua điểm điều khiển chiến đấu, tới người vận hành các hệ thống phòng không khác nằm trong hệ thống phòng không phân lớp chung. Chuyến bay của UAV nên được thực hiện phần lớn ở chế độ tự động dọc theo một quỹ đạo nhất định. Một hệ thống phòng không tầm xa nên bao gồm hai AWACS. Trong trường hợp này, họ có thể thực hiện nhiệm vụ chiến đấu theo ca trên các vị trí của hệ thống phòng không trong thời gian 36-48 giờ, tùy thuộc vào độ xa của sân bay gia đình.
Các yêu cầu đối với UAV AWACS tầm xa cũng giống như đối với UAV dành cho hệ thống phòng không tầm ngắn và tầm trung - nguồn lực tác chiến cao và chi phí cho mỗi giờ bay thấp.
Một câu hỏi có thể nảy sinh: tiêu đề của bài báo đề cập đến hoạt động của hệ thống phòng không đối với các mục tiêu bay thấp mà không có sự tham gia của lực lượng hàng không Không quân, và các UAV có thời gian bay dài rõ ràng có liên quan đến hàng không. Ở đây câu hỏi là liên quan đến bộ phận. Tại Hoa Kỳ, theo thỏa thuận Johnson-McConnell giữa lục quân và Không quân, máy bay trực thăng không thuộc Lực lượng Không quân và trực thuộc Quân đội Hoa Kỳ, hành động vì lợi ích của nó (việc phân chia máy bay ở Hoa Kỳ giữa quân đội và không quân được viết tốt đây). Vì vậy, trong trường hợp của chúng tôi, thực tế là UAV thuộc một hệ thống phòng không cụ thể sẽ không cho phép Không quân sử dụng nó cho các mục đích khác.
Phòng không nhiều lớp với UAV AWACS
Việc sử dụng các UAV AWACS loại quadcopter và các UAV AWACS tầm xa sẽ tạo ra vùng phủ sóng radar dày đặc trong khu vực và cung cấp khả năng chỉ định mục tiêu cho các tên lửa có ARGSN và IR tìm kiếm ở cự ly tối đa.
Có lẽ, đối với hai hệ thống phòng không tầm ngắn, cần có một phương tiện với AWACS loại quadcopter hoặc hai phương tiện cho bốn hệ thống phòng không. Hệ thống phòng không tầm trung nên bao gồm hai phương tiện với AWACS kiểu quadrocopter. Hai UAV AWACS tầm xa nên được xếp vào hệ thống phòng không tầm xa.
Trong thời kỳ bị đe dọa hoặc trong trường hợp bùng nổ chiến sự, các UAV tầm xa phải thực hiện các cuộc tuần tra liên tục trên các vị trí của hệ thống phòng không. Các UAV thuộc loại quadrocopter, từ thành phần của hệ thống phòng không tầm ngắn và tầm trung, phải ở trên các phương tiện vận tải trong tình trạng sẵn sàng phóng ngay lập tức. Trong trường hợp phát hiện mối đe dọa trên không, việc phóng UAV kiểu quadrocopter nên được thực hiện trong vòng vài phút.
Chi phí của bản thân các UAV và thời gian bay của chúng theo truyền thống thấp hơn đáng kể so với chi phí của máy bay có người lái và máy bay trực thăng, điều này làm cho nhiệm vụ này trở nên hấp dẫn về mặt kinh tế. Khái niệm đề xuất về mặt kỹ thuật cũng không chứa các vấn đề không thể vượt qua.
Đối với các vật thể tĩnh có tầm quan trọng cao, có thể sử dụng bóng bay AWACS. Trong trường hợp phòng không các đối tượng được trang bị khinh khí cầu AWACS, không cần sử dụng UAV thời gian dài và có thể bị loại khỏi hệ thống phòng không tầm xa hoặc có thể ở sân bay sẵn sàng cất cánh như một phương tiện dự phòng để trinh sát và xác định mục tiêu. sự chỉ định.
UAV AWACS cho hạm đội
Trước đây, người ta chỉ xem xét đến việc sử dụng AWACS UAV vì lợi ích của các hệ thống phòng không trên mặt đất. Nhưng không kém, và có lẽ nhiệm vụ quan trọng hơn là việc sử dụng các UAV AWACS kiểu quadcopter và các UAV có thời gian bay dài phục vụ cho nhiệm vụ phòng không của các tàu hải quân. hạm đội (Hải quân). Với thực tế là chúng ta không có tàu sân bay và do đó, trên đó có các máy bay AWACS, các tàu chiến hiện đại của Nga được bảo vệ kém hơn trước các cuộc tấn công trên không, bất kể chúng có loại phòng không nào, do hạn chế vật lý về phạm vi phát hiện thấp- mục tiêu bay.
Việc sử dụng các UAV kiểu quadrocopter trên các tàu của Hải quân Nga sẽ đẩy lùi đáng kể ranh giới tiêu diệt các mục tiêu bay thấp. Và việc gửi các UAV với thời gian bay dài và tầm bay đến khu vực có tàu của Hải quân sẽ giúp họ có thêm cơ hội để trinh sát các lực lượng đối phương và đưa ra chỉ định mục tiêu cho tên lửa. vũ khí tầm xa.

Ý tưởng về tàu Dreadnought 2050 của Anh với một UAV được kết nối với tàu bằng cáp ống nano carbon và cáp siêu dẫn được làm mát bằng đông lạnh
Không thể loại trừ việc sử dụng khinh khí cầu và khí cầu AWACS vì lợi ích của Hải quân, đặc biệt là kể từ khi lịch sử có những ví dụ về việc sử dụng khinh khí cầu của hạm đội Nga.
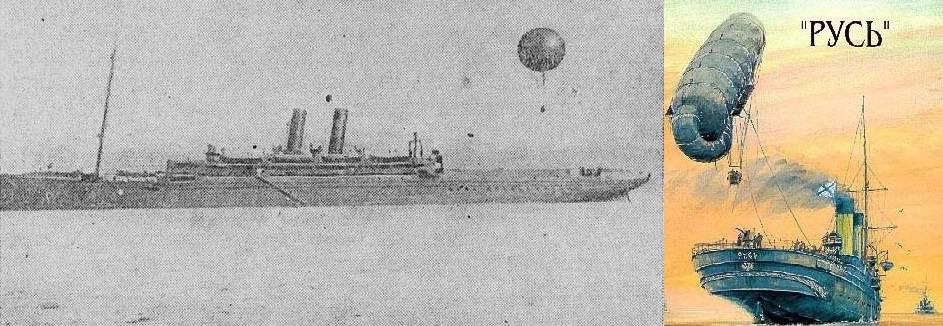
Tuần dương hạm "Rus" với khinh khí cầu có dây buộc
Những phát hiện
Hệ thống phòng không trên bộ và trên bộ nếu không có khả năng tấn công các mục tiêu bay thấp ở khoảng cách xa sẽ bị đánh bại.
Để giải quyết vấn đề này, vì lợi ích của các hệ thống phòng không tầm ngắn và tầm trung, cần phải tạo ra một UAV AWACS kiểu quadcopter, tốt nhất là được cung cấp điện qua cáp từ phương tiện vận tải.
Đối với hệ thống phòng không tầm xa, cần tăng cường phát triển các UAV AWACS tầm xa.
Đối với các vật thể tĩnh có tầm quan trọng cao, có thể sử dụng bóng bay AWACS.
Tất cả các hệ thống trên (UAV AWACS kiểu quadcopter, UAV AWACS thời gian dài và khí cầu AWACS) đều có tầm quan trọng lớn đối với việc nâng cao hiệu quả và khả năng tồn tại của không chỉ các hệ thống phòng không trên mặt đất mà còn cả các tàu của Hải quân Nga.
tin tức