Andronaut sẽ xuất hiện trên ISS

Các nhà khoa học Nga đang hoàn thành công việc tạo ra chiếc máy bay nội địa đầu tiên người máytrợ lý cho công việc trên Trạm vũ trụ quốc tế.
Hệ thống robot nhân hình "Andronaut" đã được giới thiệu trong khuôn khổ Hội nghị Khoa học và Thực hành Quốc tế lần thứ XI "Các chuyến bay không gian có người lái", khai mạc vào ngày 10 tháng XNUMX tại Trung tâm Đào tạo Phi hành gia. Yu.A. Gagarin ở Star City.

Họ đặt tên cho robot là "Andronaut". Anh cao 1m90, vai rộng - một người đàn ông đẹp trai ("Đàn ông"! Các nhà nữ quyền đang rên rỉ). Đặc thù của nó là được nhân hóa, tức là về cấu tạo, cấu trúc của nó giống với một người. Và đây là lợi thế lớn của nó.

Các nhà phát triển: các chuyên gia từ Trung tâm Đào tạo Phi hành gia Gagarin và viện chi nhánh FSUE TsNIIMash, cũng như các nhà du hành vũ trụ Roscosmos.
“Sự xuất hiện của một robot trợ lý trên ISS, một mặt, sẽ dỡ bỏ các hoạt động của phi hành gia, mặt khác, nó có thể làm phức tạp hệ thống, vì một người mới tham gia sẽ xuất hiện giữa“ môi trường chuyên nghiệp ”và phi hành gia - người máy trợ lý. Vì vậy, trong lĩnh vực này, nghiên cứu bổ sung về công thái học là rất quan trọng và cần thiết, điều này sẽ cho phép thu thập thêm kiến thức trong lĩnh vực nghiên cứu hệ thống tương tác giữa robot và người. ”, - Igor Sokhin, giám đốc dự án tại CPC, phó trưởng phòng khoa học CPC cho biết.

"Andronaut" thuộc loại cuối cùng của hệ thống robot, nó có thể được điều khiển từ xa bởi người vận hành. Ví dụ, một thành viên phi hành đoàn từ khoang điều áp trên mặt trăng, mặc một bộ đồ đặc biệt (bộ xương ngoài), sẽ có thể điều khiển một robot ở khoảng cách rất xa trên bề mặt của mặt trăng.
Robot sẽ thực hiện công việc đơn điệu cơ học trong các thí nghiệm, chẳng hạn như cung cấp các công cụ cho phi hành gia.
Robot cũng có thể được điều khiển từ mặt đất bởi người điều hành Trung tâm điều khiển sứ mệnh. Ở chế độ tự động, robot trợ lý phải hỗ trợ phi hành đoàn trong việc thực hiện các hoạt động bay khác nhau, chẳng hạn như cung cấp cho phi hành gia các công cụ cần thiết. Andronavt, được trang bị giao diện đa phương thức, cũng có thể cung cấp hỗ trợ thông tin: người điều hành có thể đặt câu hỏi và nhận câu trả lời bằng tin nhắn thoại hoặc đọc văn bản đa phương tiện trên máy tính bảng. Ngoài "gợi ý" thông tin, vấn đề cung cấp hỗ trợ tâm lý cho Andronaut cho các thành viên phi hành đoàn đang được giải quyết.
Bây giờ ISS được sử dụng như một nền tảng thử nghiệm, các công nghệ mới nhất đang được phát triển, đặc biệt là các công nghệ robot.

Ví dụ, tổ hợp robot Canada "Canadianarm" được lắp đặt trên ISS "hoạt động" để chuyển các cấu trúc lớn.

"Cargo Arrow" (GST) - cần cẩu hàng để di chuyển hàng hóa và phi hành gia dọc theo bề mặt bên ngoài của nhà ga. Nó đã được sử dụng tại trạm "Mir" của Liên Xô / Nga và được sử dụng trong phân đoạn ISS của Nga.
Hai cần cẩu. Cả hai đều được cài đặt trên mô-đun Pirs. Chiếc đầu tiên được chuyển giao trong chuyến bay STS-96, chiếc thứ hai - STS-101. Sau đó, do tuổi thọ của Pirs sắp kết thúc, các cần trục đã được di chuyển lên bề mặt của các mô-đun Poisk và Zarya (vào năm 2012).

Nhà chế tác châu Âu ERA đã có được một địa điểm mới - mô-đun phòng thí nghiệm đa chức năng Nauka, được tạo ra bởi Trung tâm Không gian Sản xuất và Nghiên cứu Nhà nước Khrunichev trên cơ sở mô-đun dự trữ FGB-2. Nó sẽ chứa các điểm đính kèm cơ sở và thiết bị điều khiển thao tác.
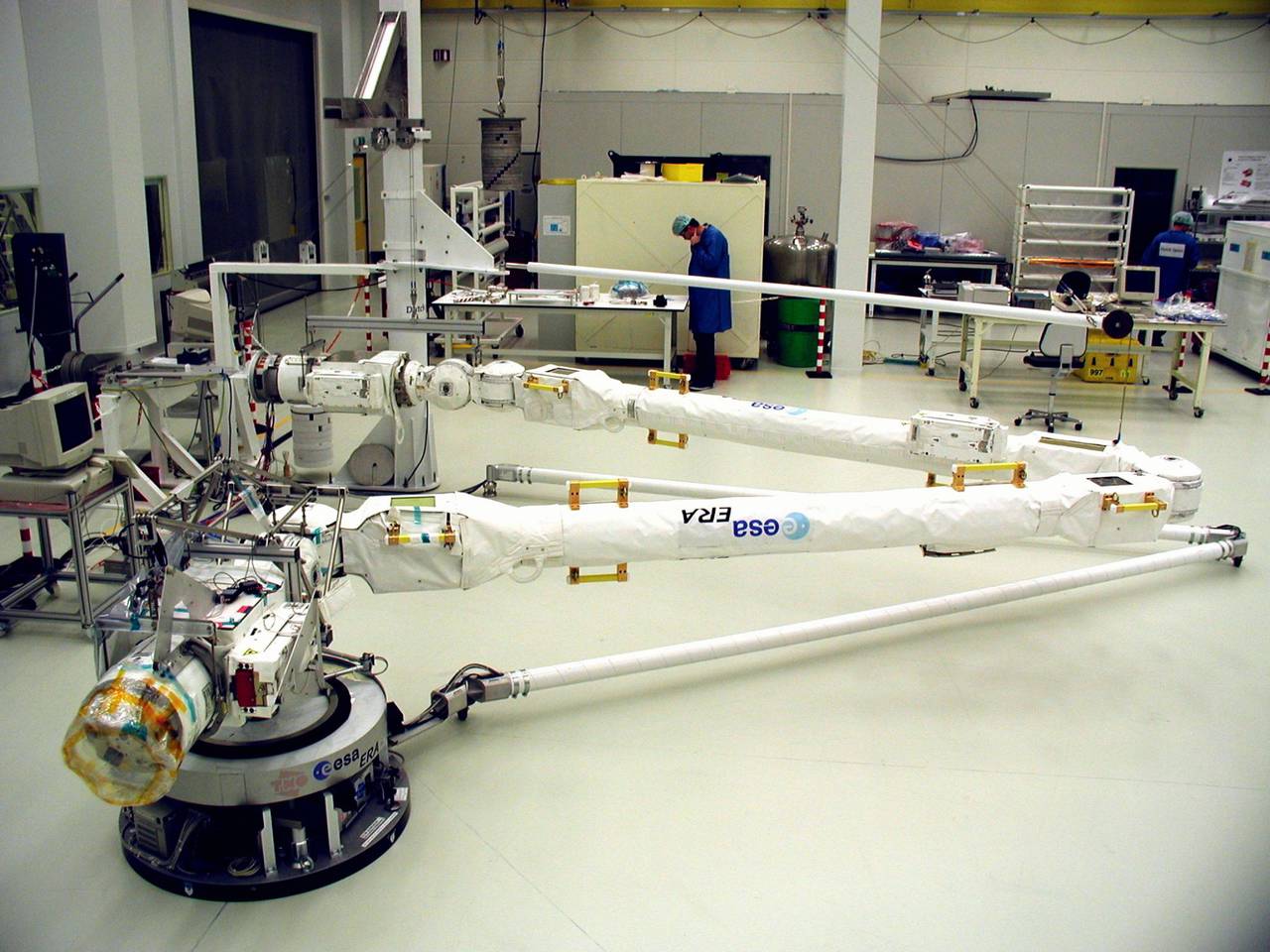
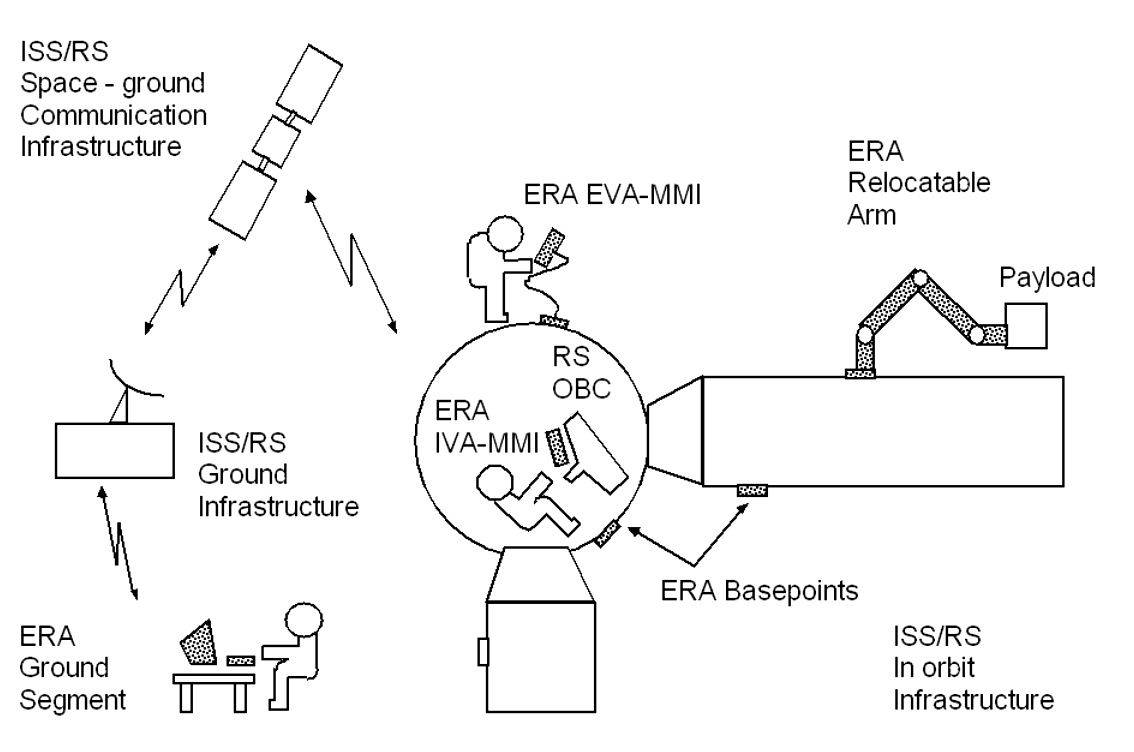
Thật đáng tiếc khi anh ấy vẫn còn ở trên Trái đất (do thảm họa Columbia, các kế hoạch đã thay đổi).
Robonaut 2 là một robot hình người được phát triển bởi NASA và General Motors. Đó là một hình người không chân, đầu được sơn bằng sơn vàng, và thân màu trắng. Trên bàn tay của rô bốt, năm ngón tay có khớp giống như ngón tay của con người. Máy có thể viết, lấy và xếp đồ vật, đựng những vật nặng, chẳng hạn như một quả tạ 9 kg. Robot chưa có nửa thân dưới. Bốn máy quay video được gắn trong mũ bảo hiểm R2, nhờ đó robot không chỉ tự định hướng trong không gian mà còn truyền tín hiệu từ chúng đến màn hình của bộ điều khiển. Mũ bảo hiểm còn có camera hồng ngoại. Tổng số cảm biến và cảm biến là hơn 350. Cổ của robot có ba bậc tự do và mỗi cánh tay, có sải tay là 244 cm, có bảy bậc. Bàn chải của thiết bị có 12 bậc tự do. Mỗi ngón tay có thể chịu được tải trọng lên đến 2,3 kg. Trong "bụng" robot là một trung tâm máy tính, bao gồm 38 bộ vi xử lý PowerPC. Về mặt cấu trúc, robot được làm chủ yếu bằng nhôm và thép. Khối lượng của Robonaut 2 là 150 kg và chiều cao là 1 m. Một ba lô có hệ thống năng lượng được đặt ở phía sau của rô bốt.
Robonaut-2 khởi hành đến ISS vào ngày 24 tháng 2011 năm 133 trên tàu con thoi STS-XNUMX Discovery và sẽ hoạt động toàn thời gian trên trạm.
Mục đích của việc phóng robot là để kiểm tra hoạt động của nó trong trạng thái không trọng lượng, để nghiên cứu ảnh hưởng của bức xạ vũ trụ và điện từ đến hoạt động của nó.
Vào ngày 14 tháng 2014 năm 2,7, Cơ quan Vũ trụ Hoa Kỳ (NASA) sẽ gửi chân cho một robot. Điều thú vị là sau khi các chân được kết nối với robot hình người, tổng chiều cao của nó sẽ là XNUMX mét. Mỗi chân của robot có bảy kết nối.

Nhưng cho đến nay, theo hiểu biết của tôi, điều này (giao chi dưới) đã không xảy ra.
Một chút những câu chuyện rô bốt vũ trụ trong nước
Lyappa là một máy thao tác cơ khí lớn được sử dụng trong quá trình lắp ráp trạm quỹ đạo Mir của Liên Xô. Bộ điều khiển được gắn trực tiếp vào các mô-đun trạm đã lắp ráp. Mỗi mô-đun "Quantum-2", "Crystal", "Spectrum" và "Nature" được trang bị một bản sao của lyappa.

Bộ điều khiển cũng được sử dụng để thay đổi vị trí của các mô-đun trạm, cho phép chúng xoay 90 °.
SAR-401 từ Công nghệ Android NPO.


Nguyên tắc của điều khiển hình đại diện là lặp lại các chuyển động của người vận hành mặc bộ đồ đặc biệt (trong trường hợp SAR-401, thiết bị chính kiểu sao chép UKT-3 được sử dụng).
Kể từ năm 2013, nhiều kịch bản điều khiển khác nhau đã được đưa ra trong các điều kiện trên cạn: từ bảng ISS và một kịch bản khẩn cấp để điều khiển robot từ Trái đất. Xin lỗi, nhưng đây vẫn là một lựa chọn không bay.
Video liên quan: Top 5 robot hình người của năm 2015.
Tư liệu, hình ảnh và video đã qua sử dụng:
http://robotrends.ru
http://chrdk.ru
http://trinixy.ru
http://www.gctc.ru/
http://v-kurse.ru/
www.youtube.com
en.wikipedia.org
en.wikipedia.org
http://robonaut.jsc.nasa.gov/mobility
tin tức