Sự phát triển của các hệ thống điều khiển của tàu vũ trụ Liên Xô thời kỳ đầu

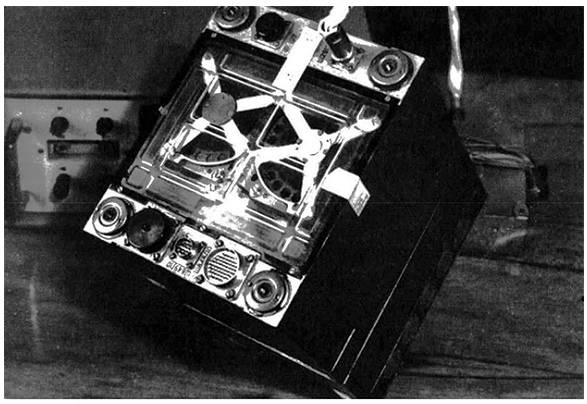
Mô hình "Sputnik-1" với phần trình diễn các thiết bị bên trong. Ảnh Bảo tàng Vũ trụ
Thật khó để tưởng tượng một tàu vũ trụ hiện đại, dùng một lần hoặc tái sử dụng, trong nước hay nước ngoài, mà không có hệ thống điều khiển phức tạp được xây dựng trên cơ sở máy tính hiệu suất cao. Tuy nhiên, điều này không phải lúc nào cũng đúng. Tàu vũ trụ đầu tiên do Liên Xô thiết kế hoàn toàn không có bất kỳ hệ thống điều khiển nào. Sau đó, các thiết bị đơn giản đầu tiên xuất hiện trên các thiết bị và sự phát triển hơn nữa của chúng đã dẫn đến sự xuất hiện của các máy tính đa chức năng chính thức.
Dọc theo một con đường định sẵn
Các tàu thăm dò và thiết bị trong nước và nước ngoài được sử dụng trong các thí nghiệm và nghiên cứu ban đầu trong lĩnh vực tên lửa và công nghệ vũ trụ không có hệ thống điều khiển chính thức. Trên máy bay có các thiết bị tự động hóa cho các đơn vị và hệ thống riêng lẻ, nhưng khả năng điều khiển chuyến bay chính thức không được cung cấp. Hơn nữa, vào thời điểm đó không có nhu cầu cho họ.
Ví dụ, vệ tinh Trái đất nhân tạo đầu tiên SP-1 (Sputnik-1), được phóng vào tháng 1957 năm XNUMX, có một bộ pin, một máy phát vô tuyến, một bộ cảm biến và thiết bị làm mát trên tàu. Không có thiết bị xác định tọa độ và vị trí trong không gian, cũng như điều khiển chuyến bay. Vệ tinh được cho là sẽ di chuyển dọc theo quỹ đạo được xác định khi nó được phóng.

Mô hình của "Sputnik-2". Trong trường hợp thấp hơn có một "cabin" với một nơi dành cho một con chó. Ảnh của Wikimedia Commons
Sputnik-2 tiếp theo được chế tạo theo nguyên tắc tương tự, tải trọng của nó là thùng chứa chú chó Laika. Trên tàu chỉ có các công cụ để thu thập và truyền dữ liệu về trạng thái của con vật. Tuy nhiên, việc tự động hóa một số quy trình, chẳng hạn như làm mát một thùng chứa có thể ở được, cũng đã được dự kiến.
Điều khiển từ xa
Ngay cả ở giai đoạn nghiên cứu sơ bộ, rõ ràng là công nghệ vũ trụ đầy triển vọng nên có một số phương tiện kiểm soát. Một cách độc lập hoặc theo mệnh lệnh từ Trái đất, các vệ tinh phải bật thiết bị, tiến hành nghiên cứu, v.v. Những vấn đề thiết kế như vậy đã được giải quyết vào đầu năm 1958 khi chế tạo tàu vũ trụ tiếp theo.
Tháng 1958 năm 3, Sputnik-12 hay vật thể D đi vào quỹ đạo. Lần đầu tiên trong thực tế trong nước, thiết bị này nhận được phương tiện tự động và điều khiển từ xa. Tổ hợp thiết bị đo đạc trên tàu có thể nhận và thực hiện lệnh từ trạm điều khiển mặt đất. Có XNUMX dụng cụ khoa học cho các mục đích khác nhau trên tàu, được bật và tắt bằng lệnh hoặc bằng thiết bị lập trình thời gian trên tàu. Ngoài ra, ở một số phần của quỹ đạo, nơi không có kết nối với Trái đất, việc ghi từ xa trên băng từ sẽ tự động được bật. Sau khi kết nối được khôi phục, thông tin đã ghi được truyền đi.
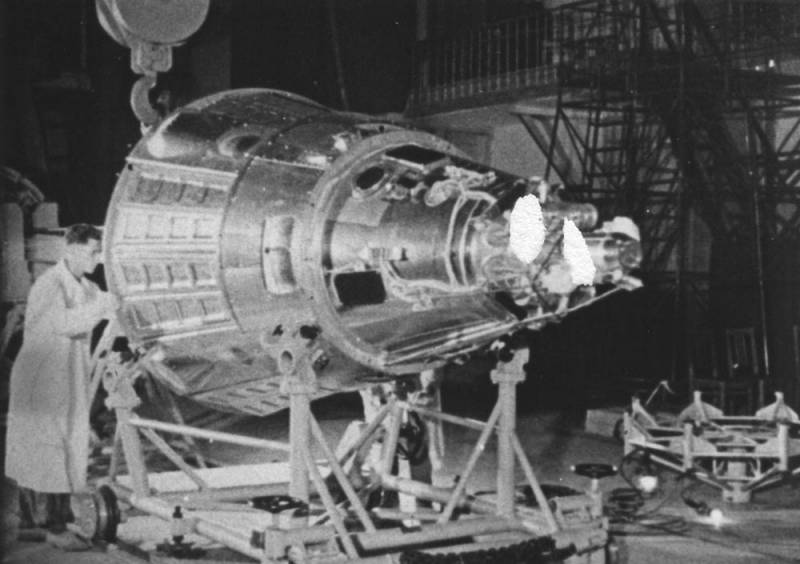
"Sputnik-3"/"D" ở giai đoạn lắp ráp. Ảnh của RGANTD
Ngay sau đó, điều khiển từ xa bằng lệnh vô tuyến đã được sử dụng trong lĩnh vực nghiên cứu liên hành tinh. Bắt đầu từ mùa thu năm 1958, Liên Xô đã thực hiện một số nỗ lực gửi các trạm liên hành tinh tự động lên Mặt trăng. Các lần phóng đầu tiên kết thúc trong tai nạn, và chỉ đến tháng 1959 năm 1, Luna-2 AMS mới có thể bay sát vệ tinh tự nhiên của Trái đất. Vào tháng XNUMX cùng năm, tàu vũ trụ Luna-XNUMX lần đầu tiên hạ cánh xuống mặt trăng - một cách khó khăn, với sự phá hủy cấu trúc.
Trên các sản phẩm đầu tiên của Luna có một bộ dụng cụ đo lường cho nhiều mục đích khác nhau, thiết bị giám sát hoạt động của chúng, cũng như một đài phát thanh để nhận lệnh và truyền phép đo từ xa. Đối với chuyến bay tới Mặt trăng, các trạm đã được lắp đặt trên cái gọi là. khối "E" - tầng thứ ba của tên lửa mang "Vostok-L" với khả năng điều khiển từ xa. Đơn vị chịu trách nhiệm đưa AMS đến quỹ đạo đã tính toán.
Sau khi phóng, chuyến bay của tên lửa Vostok-L cùng với Luna được theo dõi từ mặt đất bằng thiết bị radar, ban đầu được tạo ra để thử nghiệm tên lửa đạn đạo. Dữ liệu quỹ đạo được nhận và xử lý bởi một hệ thống máy tính đặc biệt dựa trên máy BESM-2. Khi sản phẩm "E" với "Mặt trăng" lệch khỏi quỹ đạo tối ưu, phức hợp hình thành và truyền lệnh cho nó để điều chỉnh quỹ đạo. Nói chung, một hệ thống như vậy hoạt động tốt, mặc dù vẫn có lỗi.
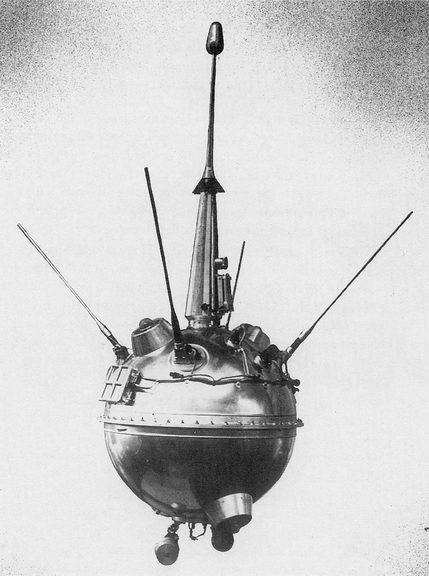
Trạm tự động "Luna-2". Ảnh của Wikimedia Commons
Các tính năng mới
Tàu vũ trụ ban đầu chỉ có thể bay theo quỹ đạo được tính toán trước, được phóng bằng phương tiện phóng hoặc tầng trên. Để phát triển hơn nữa các chương trình không gian, cần phải phát triển một số công cụ điều khiển cho phép định hướng thiết bị trong không gian và thực hiện các thao tác.
Những thành công đầu tiên theo hướng này đã đạt được trong quá trình phát triển Luna-3 AMS, được phóng thành công vào tháng 1959 năm XNUMX. Một hệ thống định hướng quang điện Chaika ban đầu đã được tạo ra cho trạm này. Nó bao gồm các yếu tố quang học xác định vị trí của Mặt trời và Mặt trăng so với AMS, một thiết bị điện toán và động cơ chuyển hướng. Các thiết bị khoa học của trạm, như trước đây, hoạt động theo chương trình đã thiết lập hoặc lệnh từ trung tâm điều khiển.
Chính sự hiện diện của hệ thống "Chaika" đã cho phép "Luna-3" chụp ảnh vệ tinh tự nhiên của Trái đất, bao gồm cả vệ tinh tự nhiên của Trái đất. mặt trái của nó. Trong tương lai, những phát triển trên hệ thống này và những ý tưởng chính của nó đã được sử dụng tích cực trong các dự án công nghệ vũ trụ khác.
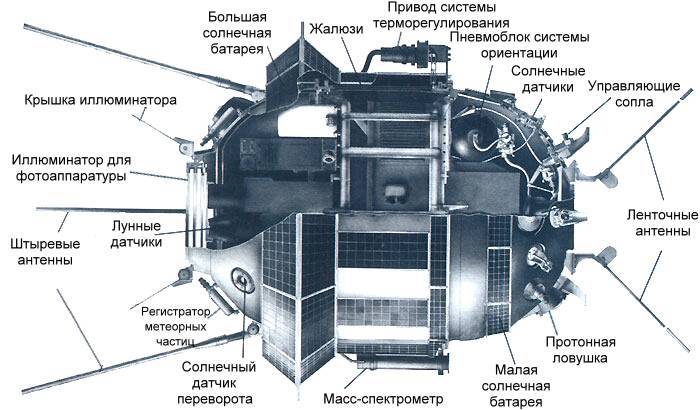
"Luna-3" với hệ thống định hướng "Seagull". Đồ họa Astronaut.ru
kiểm soát tự trị
Kể từ năm 1957, việc phát triển tàu vũ trụ có người lái đầy hứa hẹn, sau đó được gọi là Vostok, đã được tiến hành. Ông đã nhận được các hệ thống điều khiển tự động và thủ công sao chép lẫn nhau. Tất cả các phương tiện được phân biệt bởi một sự đơn giản nhất định và tương ứng với các nhiệm vụ được đặt ra. Vì vậy, thiết bị cho phép thực hiện định hướng trên quỹ đạo và thực hiện hạ cánh. Các chức năng khác hầu như không có. Để định hướng trong không gian, con tàu có một bộ động cơ công suất thấp được điều khiển bởi tự động hóa hoặc phi hành gia.
Căn chỉnh ngang được thực hiện bằng cảm biến hồng ngoại. Dọc theo trục của quỹ đạo, con tàu được hướng dẫn bởi Mặt trời (tự động) hoặc bởi Trái đất, sử dụng thiết bị Vzor (thủ công). Một cách độc lập hoặc theo mệnh lệnh, tự động hóa có thể thực hiện việc hạ cánh khỏi quỹ đạo bằng cách sử dụng hệ thống đẩy hãm. Nhà du hành vũ trụ được yêu cầu thực hiện các nhiệm vụ này với sự trợ giúp của thiết bị định vị Globus, thiết bị đã tính toán khu vực hạ cánh gần đúng.
Vào tháng 1960 năm 4, lần phóng thử nghiệm đầu tiên của Vostok trong cấu hình không người lái đã diễn ra. Thiết bị có tên gọi "Sputnik-19" không thể quay trở lại Trái đất do lỗi trong hệ thống định hướng. Sau đó, một số lần ra mắt khác đã diễn ra, bao gồm. với trọng tải dưới dạng thiết bị khoa học, động vật và hình nộm. Ví dụ, vào ngày 1960 tháng XNUMX năm XNUMX, Belka và Strelka nổi tiếng đã đi vào vũ trụ. Vì những lý do rõ ràng, những chuyến bay này chỉ sử dụng điều khiển tự động và từ xa.

Bảng điều khiển của tàu vũ trụ có người lái "Vostok". Ảnh của Wikimedia Commons
Cuối cùng, vào ngày 12 tháng 1961 năm XNUMX, chuyến bay đầu tiên của Vostok đã diễn ra với cấu hình có người lái. Dưới sự điều khiển của phi công-nhà du hành vũ trụ đầu tiên trên thế giới Yu.A. Con tàu của Gagarin đã thực hiện một quỹ đạo và trở về Trái đất thành công. Trong hai năm tiếp theo, năm lần phóng tàu vũ trụ Vostok với các phi hành gia và một số lượng lớn các cuộc thử nghiệm không người lái đã diễn ra. Tất cả các hoạt động này đã xác nhận khả năng hoạt động của các hệ thống điều khiển mới.
Máy tính trên bo mạch
Ngay trong quá trình phát triển tàu vũ trụ Luna hoặc Vostok, các chuyên gia Liên Xô đã nghiên cứu các cách tiếp theo để phát triển hệ thống điều khiển cho tàu vũ trụ và AMS. Vì vậy, vào cuối những năm 1, nghiên cứu bắt đầu về chủ đề gửi tàu vũ trụ lên sao Hỏa. Lúc đầu, công việc được thực hiện trong khuôn khổ chương trình XNUMXM.
Việc sử dụng điều khiển lệnh vô tuyến trong một chương trình như vậy hầu như bị loại trừ. Các công cụ tự động riêng biệt, như trong các dự án trước, cũng có nhược điểm. Về vấn đề này, nó đã được quyết định tạo ra cái gọi là. một đơn vị tính toán dựa trên một máy tính trung tâm tích hợp, mà tất cả các hệ thống AMS khác sẽ được kết nối. Ngoài ra, nhiệm vụ tạo TSGTKS đã được giải quyết thành công với việc giới thiệu các giải pháp mới và cơ sở thành phần hiện đại. Trên thực tế, đó là về một máy tính duy nhất trên máy bay thực hiện tất cả các tác vụ trong suốt chuyến bay.
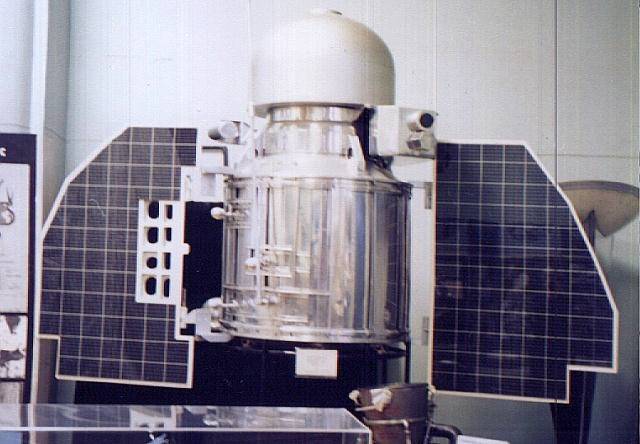
AMS "Mars-1960" với một máy tính tích hợp đầy đủ. Ảnh của Wikimedia Commons
Là một phần của chương trình 1M, hai trạm Mars-1960 đã được xây dựng. Họ phải tự động bay đến gần sao Hỏa, thu thập dữ liệu khoa học và truyền chúng về Trái đất. Việc phóng cả hai AMS diễn ra vào tháng 1960 năm XNUMX, và cả hai lần phóng đều kết thúc trong tai nạn - các trạm bị cháy trong bầu khí quyển. Không thể kiểm tra SRB trong chuyến bay.
Tuy nhiên, những phát triển về ý tưởng về TSGTKS vẫn chưa biến mất. Ngay sau đó, quá trình phát triển "tàu liên hành tinh hạng nặng" TMK bắt đầu, họ cũng quyết định trang bị một hệ thống máy tính duy nhất. Dự án này đã không thành công rực rỡ, nhưng các nhà phát triển của nó đã cố gắng tiến lên một lần nữa trong việc tạo ra các máy tính cho không gian.
Cuối cùng, như một phần của công việc TMK, khái niệm về một máy tính duy nhất trên tàu chịu trách nhiệm cho tất cả các hoạt động và hỗ trợ phi hành đoàn cuối cùng đã được hình thành và phát triển. Ngay sau đó, khái niệm này đã được sử dụng trong việc tạo ra tàu vũ trụ có người lái Soyuz, trạm quỹ đạo Salyut và một số dự án khác.
Một trong những khối máy tính đầu tiên trên tàu vũ trụ Soyuz. Ảnh habr.com
quá trình tiến hóa
Vào những năm XNUMX và XNUMX, sự phát triển của tên lửa và quả cầu không gian diễn ra với tốc độ cao. Các sự kiện quan trọng quyết định sự phát triển hơn nữa của ngành du hành vũ trụ diễn ra với tần suất đáng ghen tị và chúng thường cách nhau vài tháng. Đồng thời, một số lượng lớn các doanh nghiệp và chuyên gia từ các lĩnh vực khác nhau đã được tuyển dụng trong ngành, góp phần giải quyết vấn đề nhanh chóng.
Những xu hướng này được minh họa rõ ràng bởi sự phát triển của các hệ thống điều khiển cho tàu vũ trụ và tàu thủy. Vì vậy, vào năm 1957, Sputnik-1 đã đi vào quỹ đạo mà không có bất kỳ phương tiện điều khiển nào, và vào năm 1960, một AMS với máy tính đa chức năng đã được sản xuất và phóng. Đồng thời, các ý tưởng và khái niệm chính đã được hình thành, vẫn được sử dụng trong du hành vũ trụ - nhưng đã ở cấp độ kỹ thuật hiện đại.
tin tức