MAI đang phát triển một hệ thống điều khiển mới cho RTK tự hành
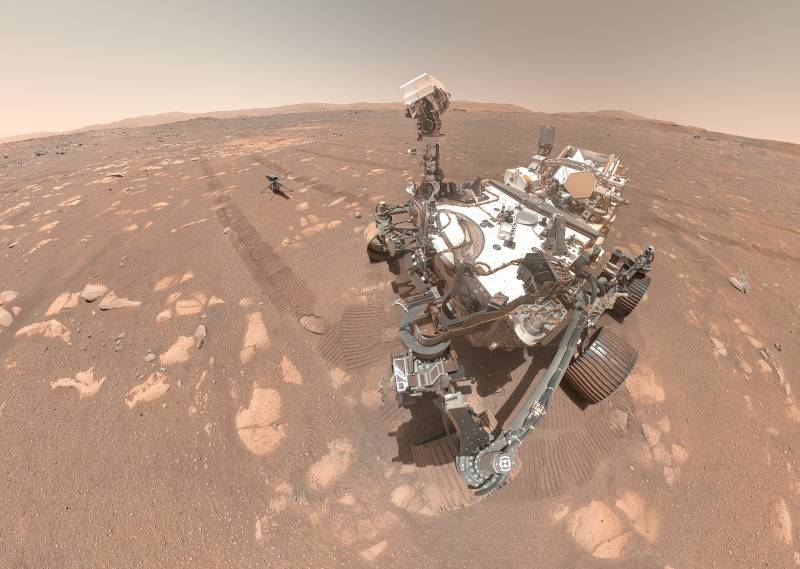
Xe tự hành Perseverance là một ví dụ về ứng dụng của công nghệ SLAM. Ảnh của NASA
Để tạo ra các hệ thống rô bốt hứa hẹn thuộc nhiều loại khác nhau, cần phải có một loạt các công nghệ khác nhau. Hệ thống điều khiển tự động, hỗ trợ tầm nhìn kỹ thuật, v.v. có tầm quan trọng đặc biệt trong bối cảnh này. Các hệ thống và công nghệ thuộc loại này đang được phát triển bởi một số tổ chức trong nước và những người tham gia mới thường xuyên tham gia công việc đó. Vì vậy, gần đây người ta đã biết về một dự án tương tự khác đang được phát triển bởi các sinh viên của Viện Hàng không Moscow.
Sự phát triển đầy hứa hẹn
Vào cuối tháng 3, dịch vụ báo chí MAI đã thông báo về việc phát triển một dự án thú vị mới. Aleksey Koltovsky, sinh viên năm thứ 6 tại Viện hàng không vũ trụ số XNUMX của MAI, tạo ra gói phần mềm có chức năng điều khiển tự động người máy. Những phát triển của dự án này trong tương lai có thể được sử dụng để tạo ra các hệ thống robot khác nhau, bao gồm cả. điểm đến không gian.
Lý do cho sự xuất hiện của dự án là cần phải loại bỏ các vấn đề và hạn chế đặc trưng mà các hệ thống không gian phải đối mặt. Vì vậy, tín hiệu vô tuyến từ Trái đất đến Sao Hỏa mất khoảng 15 phút và cần khoảng thời gian tương tự để nhận được phản hồi. Theo đó, việc điều khiển từ xa một xe tự hành hành tinh hoặc các thiết bị khác trên thực tế trở nên bất khả thi. Ngoài ra, việc đánh giá tình hình của người điều hành gặp khó khăn do chất lượng kém của ảnh hoặc tín hiệu video được gửi.
Giải pháp cho những vấn đề này, theo ý tưởng của A. Koltovsky, phải là một gói phần mềm có chức năng điều hướng và lái xe tự động. Phần cứng và phần mềm hiện đại cho phép robot tạo ra hình ảnh ba chiều về môi trường, cũng như đưa ra quyết định và lộ trình một cách độc lập.
Như đã đưa tin, hiện tại, một sinh viên-nhà phát triển đang tạo ra một gói phần mềm với các chức năng và khả năng cần thiết. Giai đoạn tiếp theo của dự án đã được lên kế hoạch. Vào mùa xuân, tác giả và các đồng nghiệp của mình sẽ tiến hành các thử nghiệm đầu tiên. Họ sẽ sử dụng một nền tảng sáu bánh tự hành, được trang bị các bộ điều khiển dựa trên các thuật toán mới.

RTK thử nghiệm "Marker", được thiết kế để thử nghiệm các công nghệ mới. Ảnh FPI
A. Koltovsky lưu ý rằng nếu thành công, các công cụ và công nghệ phần mềm mới từ dự án của ông có thể được sử dụng để tạo các RTK khác nhau nhằm giải quyết nhiều loại nhiệm vụ. Bản thân nhà phát triển chủ yếu tập trung vào lĩnh vực vũ trụ - chính các phương tiện nghiên cứu sẽ có thể nhận ra đầy đủ tiềm năng của các công nghệ mới.
Tự chủ và đơn giản hóa
Việc xuất bản dịch vụ báo chí MAI mô tả các nguyên tắc chung của hệ thống được phát triển, khả năng và lợi thế của nó. Nói chung, chúng ta đang nói về việc sử dụng các giải pháp đã biết, nhưng với sự điều chỉnh và tinh chỉnh của chúng cho các nhiệm vụ và phạm vi thực tế cụ thể. Do đó, người ta đề xuất giảm phạm vi thiết bị được sử dụng và sử dụng với số lượng thiết bị tối thiểu.
Để đơn giản hóa thiết kế và phần mềm, đề xuất chỉ sử dụng các phương tiện quang học để nghiên cứu trực quan địa hình / tuyến đường. Việc sử dụng gia tốc kế hoặc các thiết bị khác không được cung cấp. Một bộ camera được kết nối với máy tính để thực hiện các tính toán cần thiết và ra lệnh cho các bộ truyền động.
Toàn bộ khu phức hợp sẽ hoạt động trên công nghệ "bản đồ hóa và bản đồ hóa đồng thời" (Bản đồ hóa và bản đồ hóa đồng thời - SLAM). Máy tính sẽ nhận tín hiệu video từ các camera và xử lý tín hiệu đó, vẽ bản đồ khu vực với tất cả các tính năng của nó, bao gồm cả. với chướng ngại vật. Dựa trên dữ liệu này, hệ thống tự động hóa sẽ xây dựng lộ trình và quyết định cách vượt qua từng chướng ngại vật.
Phần mềm dành cho phức hợp nâng cao được viết bằng Python. Ngoài ra, tác giả sử dụng các thư viện máy học và thị giác máy. Nhiệm vụ chính hiện tại là tối ưu hóa các thuật toán và bộ dữ liệu được sử dụng để giảm sức mạnh tính toán cần thiết, đồng thời tăng hiệu suất.
A. Koltovsky lưu ý rằng thư viện OpenCV hiện có ở dạng ban đầu, không cần tối ưu hóa, có khả năng xử lý tín hiệu video với tốc độ 0,82 khung hình mỗi giây. Tối ưu hóa các thuật toán cho phép bạn tăng hiệu suất lên tới 8-10 khung hình mỗi giây.

"Điểm đánh dấu" trên khung gầm có bánh xe. Ảnh FPI
Nhìn chung, công nghệ SLAM có triển vọng đáng kể và đã thể hiện khả năng của nó trong thực tế. Vì vậy, tàu thám hiểm Kiên trì của cơ quan NASA của Mỹ xác định các chướng ngại vật, bao gồm cả. thông qua các phương tiện quang học. Xử lý ảnh và video với việc tạo bản đồ ba chiều của khu vực giúp tăng tốc độ cho phép từ 20 m/h lên 120 m/h - sáu lần.
Cần lưu ý rằng một dự án như vậy là duy nhất đối với khoa học Nga. Các nhiệm vụ tạo hệ thống phần mềm cho các hệ thống điều khiển tự trị dựa trên SLAM và khả năng thích ứng của chúng với các nền tảng điện toán năng lượng tương đối thấp ở nước ta vẫn chưa được giải quyết. Như vậy, một đồ án của sinh viên có ít nhất lịch sử Ý nghĩa.
Trong bối cảnh của ngành công nghiệp
Trong những năm gần đây, một số lượng lớn các RTK trên mặt đất với các chức năng và khả năng khác nhau đã được tạo ra ở nước ta. Một số hệ thống này thậm chí đã đạt đến hoạt động thực tế trong các cấu trúc và phòng ban khác nhau. Đặc biệt, một số loại robot dành cho quân đội đã được biết đến rộng rãi. Đồng thời, sự phát triển của ngành và sự phát triển của các dự án mới không dừng lại. Ngoài ra, nhiều tổ chức và những người đam mê đang tạo cơ sở khoa học và công nghệ cho các dự án sau.
Một trong những nhiệm vụ chính của ngành hiện nay là tạo ra các hệ thống điều khiển tự động có khả năng lái xe trong các điều kiện khác nhau, di chuyển dọc theo một tuyến đường nhất định hoặc vượt qua các chướng ngại vật một cách độc lập. Để giải quyết những vấn đề như vậy, nhiều cái gọi là thiết bị được sử dụng. tầm nhìn kỹ thuật và máy tính trên máy bay với phần mềm đặc biệt.
Bộ cảm biến tiêu chuẩn cho RTK mặt đất tự lái bao gồm máy ảnh và nắp đậy, cũng như, trong một số trường hợp, cảm biến siêu âm hoặc radar. Tất cả các thiết bị này thu thập dữ liệu mà máy tính kết hợp thành bản đồ ba chiều của khu vực, phù hợp để định hướng. Ngoài ra, dữ liệu từ vệ tinh hoặc hỗ trợ điều hướng quán tính được thêm vào bản đồ địa hình.
Phương pháp xác định vị trí, vạch lộ trình này từ lâu đã thể hiện và khẳng định tiềm năng, khả năng của nó. Tuy nhiên, nó được phân biệt bởi độ phức tạp nhất định và chi phí cao từ quan điểm phần cứng - nó sử dụng các cảm biến khá phức tạp và đắt tiền. Ngoài ra, phần nhạc cụ của RTK đã hoàn thành, do đó, khác nhau đáng kể về kích thước và trọng lượng.

Kỹ thuật nặng RTK "Prohod-1" - trong quá trình hoạt động, một phần nhiệm vụ được giải quyết bằng tự động hóa. Ảnh VNII "Signal"
Một dự án mới từ MAI đề xuất tối ưu hóa các quy trình lập bản đồ và điều hướng tiếp theo trên mặt đất. Ý tưởng chính của nó là loại bỏ tất cả các cảm biến ngoại trừ máy quay video trong khi cải thiện phần mềm được sử dụng. Về lý thuyết, cách tiếp cận này khá có lợi về mặt kỹ thuật và kinh tế, mặc dù công nghệ mới cần được phát triển và thử nghiệm.
Dự án của một sinh viên MAI hoặc những phát triển tương tự của các tác giả khác được quan tâm trong bối cảnh phát triển thêm RTK cho các nhiệm vụ khác nhau. Tăng quyền tự chủ của rô bốt trong khi lái xe cho phép bạn giảm tải cho người điều khiển và đảm bảo tuyến đường đi qua thành công.
Ngoài ra, có thể tạo ra các hệ thống hoàn toàn tự trị để làm việc trong điều kiện khó khăn, bao gồm cả. khi điều khiển vô tuyến không thể được sử dụng. Nhà phát triển hệ thống mới chỉ ra rằng điều này sẽ hữu ích trong việc khám phá không gian. Tuy nhiên, có công việc cho các máy tự trị trên Trái đất.
Lý do lạc quan
Dự án hệ thống điều khiển của sinh viên MAI vẫn đang trong giai đoạn phát triển, nhưng các cuộc thử nghiệm đã được mong đợi bằng cách sử dụng nền tảng mặt đất thử nghiệm. Một thử nghiệm thực tế về các công nghệ mới sẽ diễn ra vào mùa xuân, và sau đó sẽ rõ mức độ thành công của dự án mới. Sau đó, sẽ có thể đánh giá nó và xác định giá trị thực cho ngành.
Liệu RTK có kinh nghiệm và hệ thống điều khiển của nó có đối phó với các cuộc kiểm tra sắp tới hay không vẫn chưa được biết. Tuy nhiên, ngay cả bây giờ dự án này cho thấy rằng bây giờ - nhờ sự tiến bộ và sự sẵn có của những phát triển cần thiết - không chỉ các tổ chức lớn, mà cả những người đam mê hoặc sinh viên cũng có thể tạo ra các công nghệ đầy hứa hẹn. Và rất có thể những dự án như vậy trong tương lai sẽ có tác động đáng kể đến sự phát triển của toàn ngành.
tin tức