Robot mặt đất lớn nhưng nhanh nhẹn Máy nghiền

Máy nghiền là phương tiện mặt đất không người lái (ANA) được tạo ra vào năm 2006 bởi Trung tâm người máy quốc gia của Đại học Cargnegie Mellon (NREC) với sự tài trợ của DARPA. Mục tiêu của dự án Máy nghiền, dựa trên một ANA khác do NREC tạo ra với tên gọi Spinner (Máy nghiền đôi khi được gọi là Spinner phiên bản 2.0), không khác biệt đáng kể so với mục tiêu của tất cả các hoạt động R&D của ANA do quân đội tài trợ đang diễn ra: cải thiện nhận thức , tự chủ và độ bền cơ học. Quân đội Hoa Kỳ muốn xem phương tiện này như một loại xe tăng im lặng không có người ở, có thể mang tải trọng lớn, tự bảo vệ mình khỏi kẻ thù và di chuyển hết tốc lực trên địa hình mà xe jeep Hummer chắc chắn sẽ mắc kẹt.
Máy nghiền có thể không bao giờ được sản xuất hàng loạt. Chi phí của nó quá cao (những người sáng tạo thậm chí còn sợ nói lên những con số này). Nó được chế tạo như một nguyên mẫu hoạt động để thử nghiệm các công nghệ khác nhau mà NREC đang phát triển theo một chương trình có tên là UPI. Những công nghệ này sẽ cho phép tạo ra các phương tiện mặt đất tự động mới, tiên tiến trong tương lai.


UPI là viết tắt của Unmanned Ground Combat Vehicle PerceptOR (off-road) Integration (tích hợp nhận thức [off-road] vào một phương tiện chiến đấu mặt đất tự động). Đây là một dự án được DARPA tài trợ một phần đang tiến hành một loạt các thử nghiệm để "đánh giá khả năng của các phương tiện lớn, tự động, trên mặt đất hoạt động tự chủ ở những loại địa hình hiểm trở nhất." Máy nghiền nặng 6,5 tấn, nhẹ hơn gần 30% so với Máy quay, trong khi nó có thể chở nhiều hàng hóa hơn. Khi nâng cấp người máy Trung tâm Spinner NREC đã không giữ lại một đặc điểm rất quan trọng trong dự án mới - khả năng duy trì tuyến đường ngay cả sau khi tái đầu tư. Người ta không nói lý do tại sao tính năng "thú vị" này biến mất, mặc dù thật hợp lý khi cho rằng điều này được thực hiện để thực hiện một số chức năng khác trong robot hoặc để giảm chi phí cao, điều này không quá quan trọng đối với các mục tiêu chính của dự án UPI.

Tính năng Robot nghiền
Phương tiện không người lái này được thiết kế chủ yếu cho các nhiệm vụ trinh sát và tiếp tế, đồng thời việc không có người trên xe cho phép bạn thực hiện các phương pháp mới trong việc tạo ra một phương tiện mạnh mẽ, linh hoạt về chức năng, có thể mang trọng tải lớn. Ví dụ: Crusher có thể từ chối bảo vệ trong một số trường hợp và. do đó, đưa lên tàu nhiều trọng tải hơn.
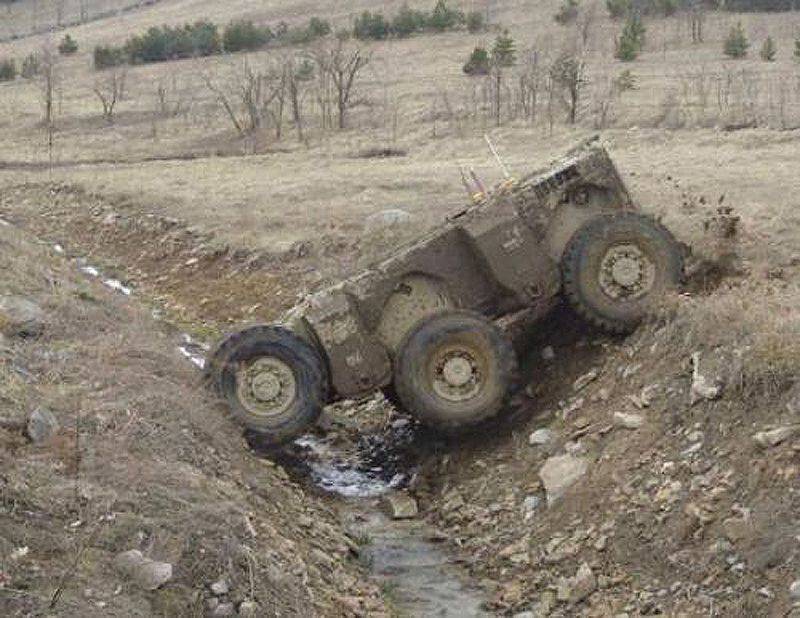
Robot có thể di chuyển qua những địa hình hiểm trở, cực kỳ khó khăn và vượt qua các chướng ngại vật gặp phải trên đường đi như bức tường thẳng đứng cao hơn 1,2 mét, sườn dốc cây cối rậm rạp, lòng sông đầy sỏi đá. Nó có thể quay 180 độ ngay tại chỗ, thay đổi khoảng sáng gầm xe 76 cm (hơn một nửa đường kính bánh xe 126 cm) nhờ hệ thống treo có thể điều chỉnh và nghiêng về bất kỳ bên nào. Máy nghiền có tải trọng 4000 kg, có thể là sự kết hợp giữa bộ bảo vệ và tải trọng. Như một phát ngôn viên của DARPA đã nói, "Chiếc xe này có thể đi đến nơi mà bạn sẽ phải ngồi xe lăn với cột sống bị tổn thương vĩnh viễn sau khi ngồi trên một chiếc Humvee." Với sự trợ giúp của các camera, ANA Crusher có thể nhìn thấy kẻ thù ở khoảng cách 3,2 km. Máy nghiền có thể leo dốc lớn hơn 40 độ và di chuyển sườn dốc lớn hơn 30 độ. Robot tăng tốc lên tốc độ tối đa 42 km / h, nhưng có thể duy trì tốc độ này không quá bảy giây.


Xây dựng
Các rô-bốt thuộc dòng này có cấu trúc khung ba chiều làm bằng nhôm và titan, cùng các tấm an toàn để bảo vệ rô-bốt khỏi tác động của các vật nặng như đá cuội. Robot có thể có một hệ thống động cơ lai cho phép nó di chuyển vài km chỉ bằng pin. Động cơ diesel sau đó được khởi động để đẩy Máy nghiền và sạc lại pin. Động cơ diesel với những sửa đổi nhỏ được lấy từ Volkswagen Jetta.
Quản lý và kiểm soát
Máy nghiền ANA không có bộ điều khiển trình điều khiển truyền thống vì nó hoạt động ở chế độ hoàn toàn tự động. Người vận hành điều khiển rô bốt từ xa bằng bảng điều khiển trò chơi điện tử, chẳng hạn như bảng điều khiển trò chơi X-Box 360. Di chuyển dọc theo các điểm tham chiếu bằng GPS, rô bốt Crusher liên tục cố gắng tìm cách dễ nhất và nhanh nhất để đến đích. Ví dụ, nếu trên đường đi xuất hiện những bức tường cao hơn 1,8m hoặc rãnh sâu hơn 1,8m, robot sẽ tìm đường tránh.
Hệ thống xem bao gồm năm camera màu với độ phân giải 1,9 megapixel. Hệ thống này cho phép bạn có được trường nhìn 200 độ theo chiều ngang và 30 độ theo chiều dọc với độ phân giải cao gấp bốn lần so với độ phân giải truyền hình thông thường.
Theo trung tâm NREC, công nghệ Máy nghiền vẫn còn lâu mới được triển khai thực tế. Mặc dù chúng ta đã có thể nhìn thấy những robot nhỏ do con người điều khiển trên chiến trường, nhưng những phương tiện lớn không người lái như Máy nghiền vẫn còn trong phòng thí nghiệm. Sự phức tạp của các hệ thống nhận thức và điều khiển, cần thiết cho các robot lớn đang cố gắng vượt qua các địa hình không xác định trong nhiều điều kiện khác nhau, không cho phép rời khỏi giai đoạn nghiên cứu. Cho đến nay, các hệ thống nhận thức và điều hướng của robot Máy nghiền đang ở giai đoạn nguyên mẫu. Là nền tảng thử nghiệm, chúng sẽ cho phép các phương pháp tiếp cận ngày càng sáng tạo đối với các phương tiện chiến đấu mặt đất không cần sự can thiệp của con người để hoàn thành nhiệm vụ.
[media=https://www.youtube.com/watch?v=WOD5NF48byo]
Vật liệu sử dụng:
www.nrec.ri.cmu.edu
en.wikipedia.org
www.hightech-edge.com
www.howstuffworks.com
www.youtube.com
www.baesystems.com
www.saabgroup.com
tin tức